Differentiaali- ja integraalilaskenta 2
6. Ääriarvojen luokittelu
Kertausta: ääriarvot yhden muuttujan tapauksessa
Funktiolla on lokaali (paikallinen) maksimi pisteessä
on lokaali (paikallinen) maksimi pisteessä  , jos
, jos \le f(a)") kaikilla
kaikilla  :n arvoilla jossakin
:n arvoilla jossakin  :n ympäristössä (eli riittävän lähellä pistettä ). Vastaavasti lokaali minimi tarkoittaa sitä, että
:n ympäristössä (eli riittävän lähellä pistettä ). Vastaavasti lokaali minimi tarkoittaa sitä, että \ge f(a)") jossakin :n ympäristössä. Maksimi tai minimi on globaali, jos kyseinen epäyhtälö on voimassa kaikilla
jossakin :n ympäristössä. Maksimi tai minimi on globaali, jos kyseinen epäyhtälö on voimassa kaikilla  .
. Ääriarvoja voi esiintyä:
- Funktion
 kriittisissä pisteissä, joissa
kriittisissä pisteissä, joissa =0") ,
, - pisteissä joissa :n derivaatta ei ole määritelty, ja
- määrittelyjoukon
 reunalla.
reunalla.
Seuraavaksi yleistetään vastaavat ehdot funktion  tapaukseen.
tapaukseen.
Ääriarvot ja usean muuttujan funktiot
Funktiolla on pisteessä  lokaali maksimi, jos jossakin pisteen
lokaali maksimi, jos jossakin pisteen  ympäristössä
ympäristössä  pätee
pätee \le f(\mathbf{x}_0)") kaikilla
kaikilla  . Vastaavasti on pisteessä lokaali minimi, jos löytyy sellainen pisteen ympäristö , että
. Vastaavasti on pisteessä lokaali minimi, jos löytyy sellainen pisteen ympäristö , että \ge f(\mathbf{x}_0)") kaikilla . Ääriarvo on globaali eli absoluuttinen, jos kyseinen epäyhtälö on voimassa kaikilla
kaikilla . Ääriarvo on globaali eli absoluuttinen, jos kyseinen epäyhtälö on voimassa kaikilla  .
. Ääriarvoja voi esiintyä:
- Funktion kriittissä pisteissä eli gradientin nollakohdissa
=0") ,
, - pisteissä joissa
 ei ole määritelty, sekä
ei ole määritelty, sekä - määrittelyjoukon
 reunalla.
reunalla.
kriittistä pistettä , joka ei ole maksimi tai minimi, kutsutaan funktion  satulapisteeksi.
satulapisteeksi.
Esimerkki
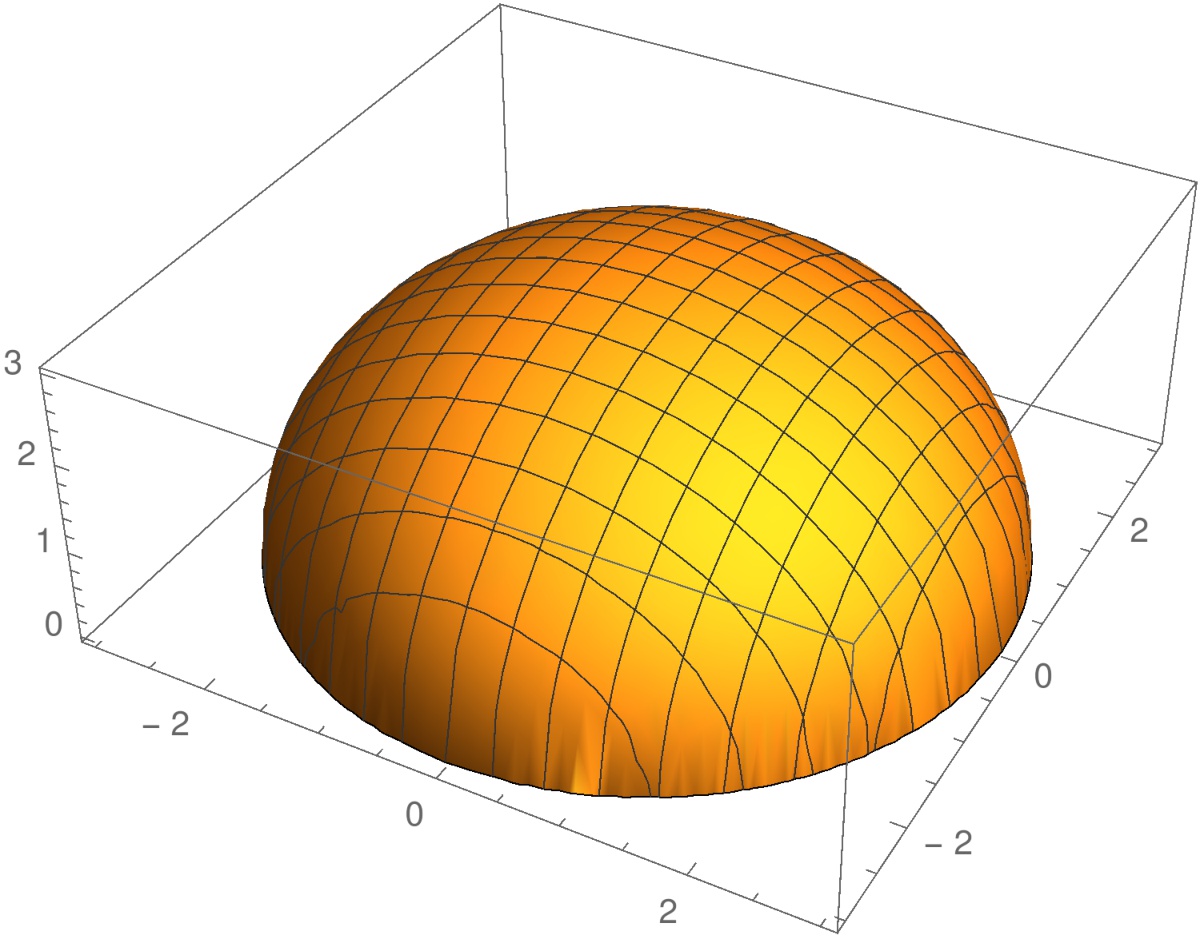
Funktiolla = 1-x^2-y^2") on globaali maksimi
on globaali maksimi =1") pisteessä
pisteessä ") . Tämä piste on funktion kriittinen piste, koska
. Tämä piste on funktion kriittinen piste, koska  = -2x\mathbf{i} -2y\mathbf{j} \Big|_{(0,0)}= \mathbf{0}.")
Esimerkki
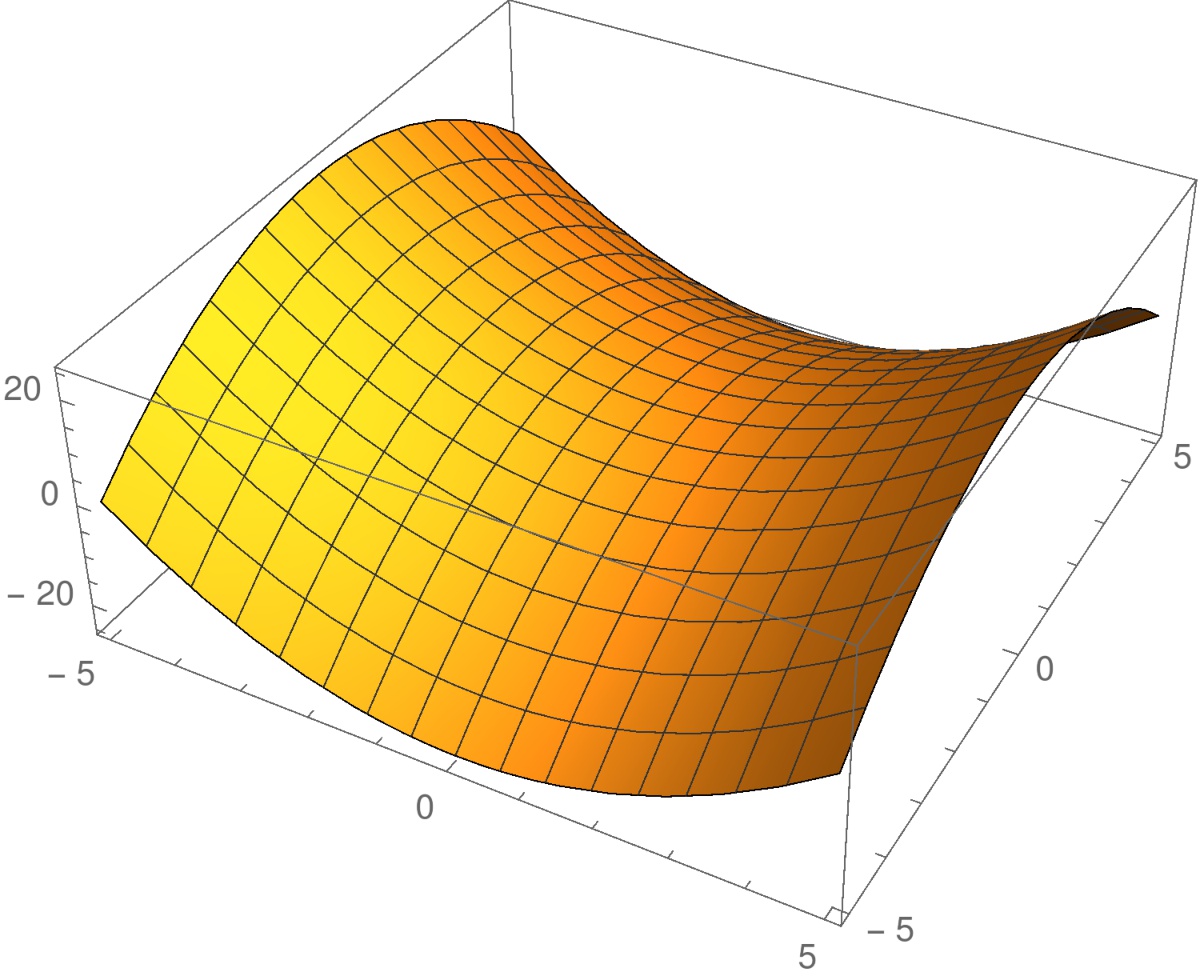
= y^2-x^2") on satulapiste . Tämä piste on funktion kriittinen piste, koska
on satulapiste . Tämä piste on funktion kriittinen piste, koska  = -2x\mathbf{i}+2y\mathbf{j}\Big|_{(0,0)}= \mathbf{0}.")
Esimerkki
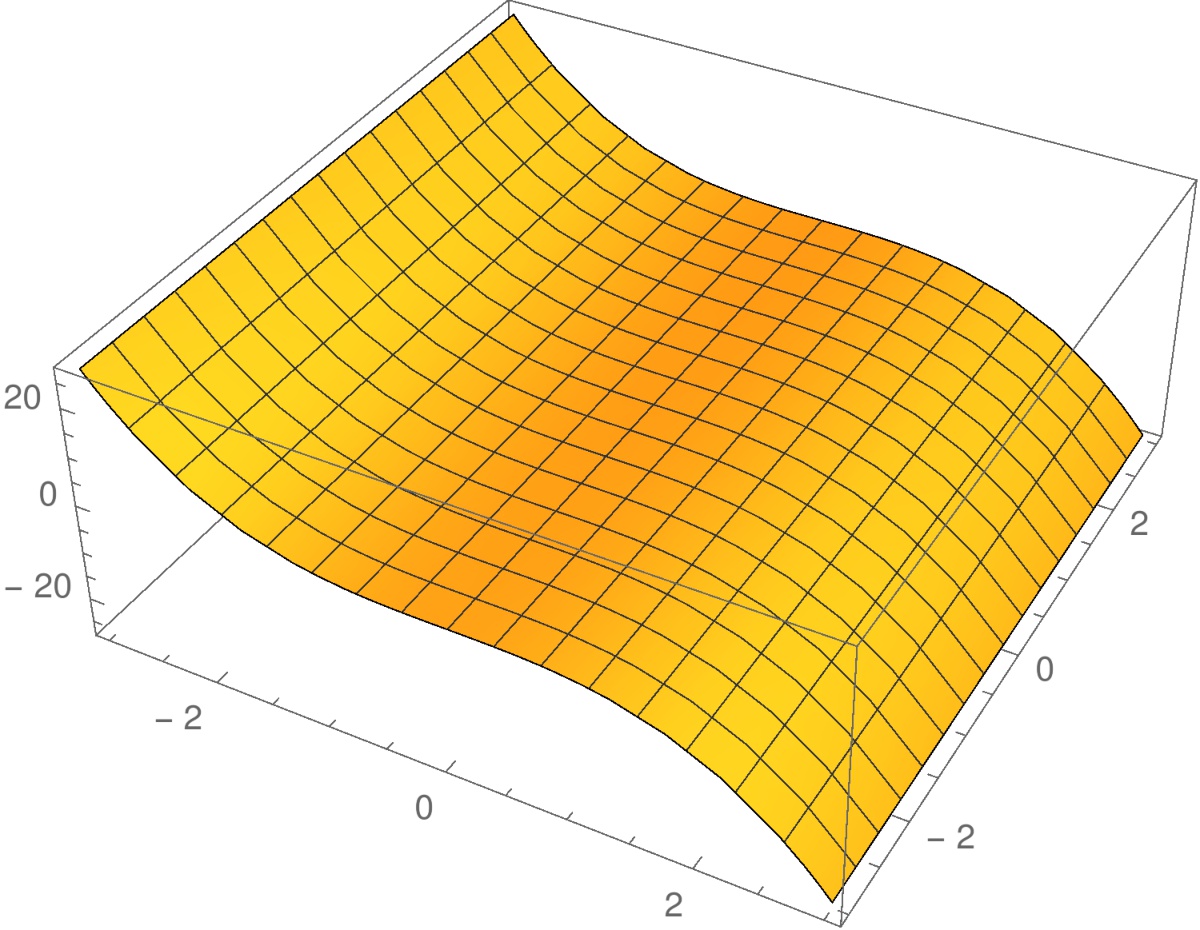
 ovat funktion
ovat funktion = -x^3") satulapisteitä. Huomaa, että
satulapisteitä. Huomaa, että  = -3x^2\mathbf{i} \Big|_{(0,y)}= \mathbf{0} \text{ kaikilla }y\in \mathbb{R}.")
Esimerkki
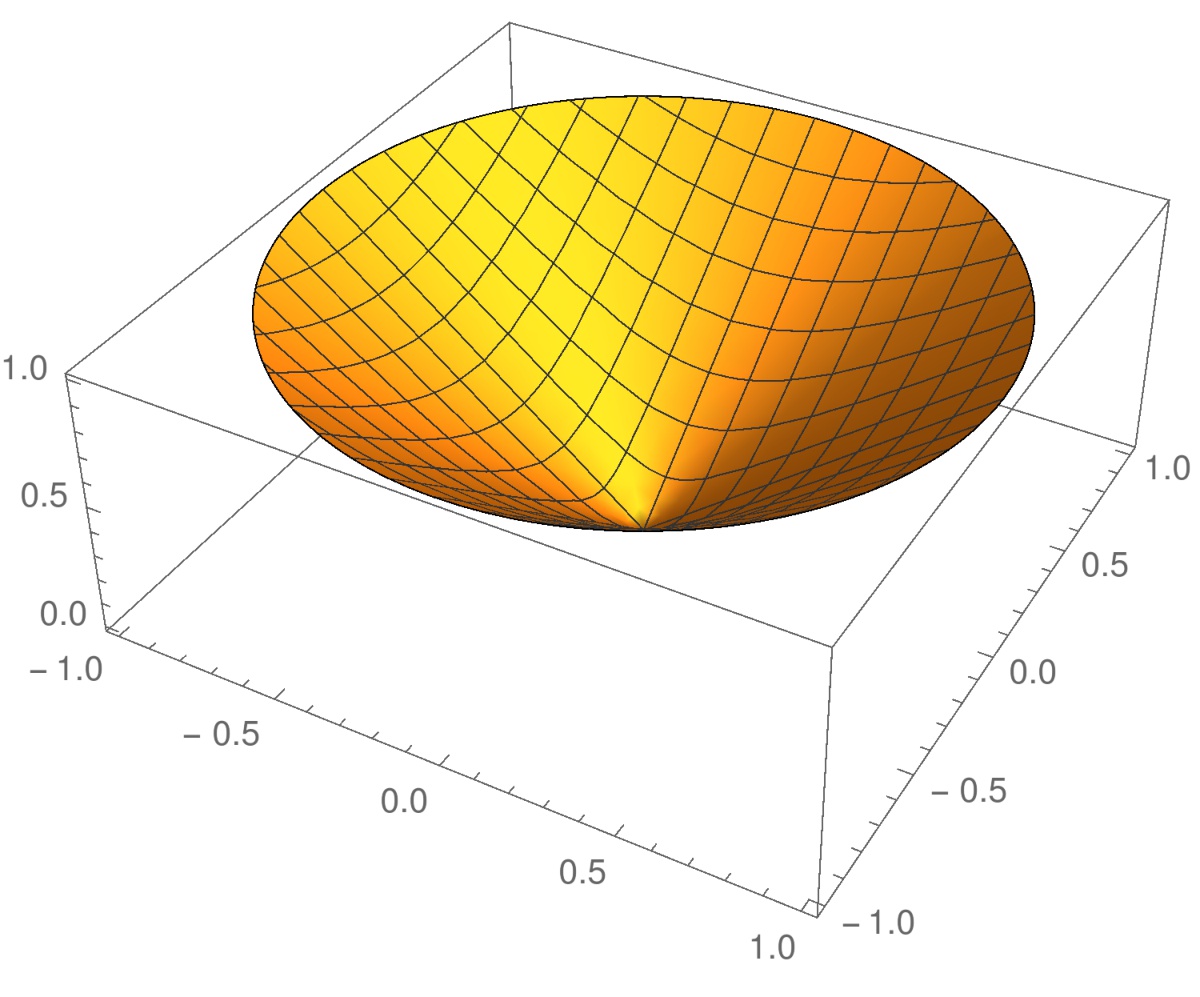
= \sqrt{x^2+y^2}") on lokaali minimi
on lokaali minimi =0") pisteessä . Funktio on jatkuva, mutta sen gradientti ei ole määritelty tässä pisteessä.
pisteessä . Funktio on jatkuva, mutta sen gradientti ei ole määritelty tässä pisteessä.
Esimerkki
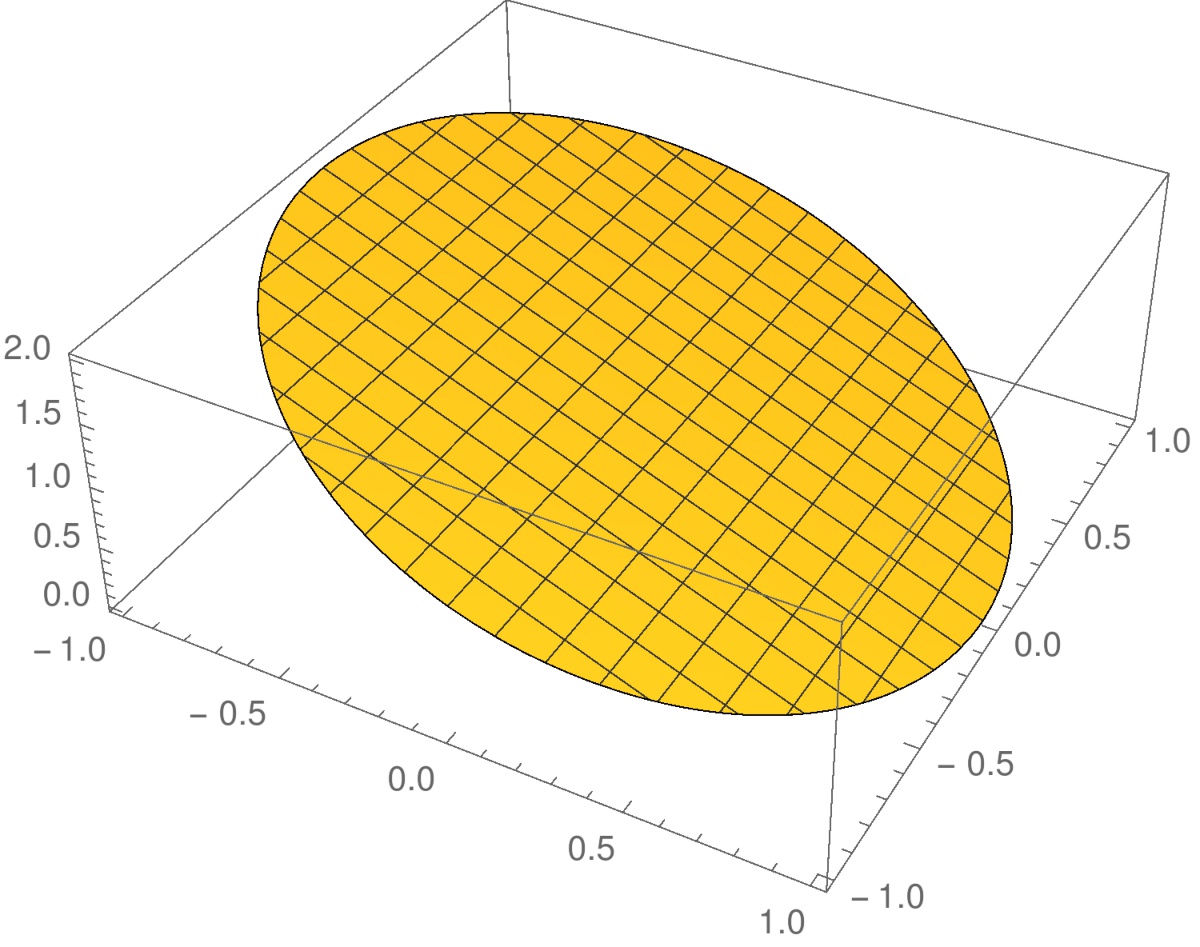
=1-x") ei ole paikallisia ääriarvoja, jos sen määrittelyjoukko on koko taso
ei ole paikallisia ääriarvoja, jos sen määrittelyjoukko on koko taso  . Jos määrittelyjoukoksi kuitenkin ajatellaan esimerkiksi kiekko
. Jos määrittelyjoukoksi kuitenkin ajatellaan esimerkiksi kiekko : x^2+y^2 \leq 1\}") , niin sen reunalla saadaan maksimi
, niin sen reunalla saadaan maksimi =2") ja minimi
ja minimi =0") .
.
Ääriarvojen luokittelu: johdanto
Ääriarvojen luokittelu perustuu suureen -f(\mathbf{x})") tarkasteluun kriittisessä pisteessä . Jos
tarkasteluun kriittisessä pisteessä . Jos  saa vain positiivisia arvoja (kun
saa vain positiivisia arvoja (kun  on pieni), on piste
on pieni), on piste  minimi ja negatiivisessa tapauksessa maksimi. Jos vaihtaa merkkiä, niin piste ei ole minimi eikä maksimi. Tämä johtaa funktion toisen derivaatan tarkasteluun kriittisessä pisteessä.
minimi ja negatiivisessa tapauksessa maksimi. Jos vaihtaa merkkiä, niin piste ei ole minimi eikä maksimi. Tämä johtaa funktion toisen derivaatan tarkasteluun kriittisessä pisteessä. Yhden muuttujan tapauksessa:
- Jos
< 0") , niin funktiolla lokaali maksimi pisteessä .
, niin funktiolla lokaali maksimi pisteessä . - Jos
>0") , niin funktiolla lokaali minimi pisteessä .
, niin funktiolla lokaali minimi pisteessä . - Jos
=0") , niin testi ei anna vastausta, ja kysymys täytyy ratkaista muulla tavoin.
, niin testi ei anna vastausta, ja kysymys täytyy ratkaista muulla tavoin.
Hessen matriisi
Olkoon funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat. Funktion luonnollinen derivaattakäsite on gradientti, joka itsessään on vektoriarvoinen funktio
funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat. Funktion luonnollinen derivaattakäsite on gradientti, joka itsessään on vektoriarvoinen funktio  . Siten funktion toinen derivaatta on matriisi, jota nimitetään Hessen matriisiksi
. Siten funktion toinen derivaatta on matriisi, jota nimitetään Hessen matriisiksi = \begin{bmatrix} \frac{\partial^2}{\partial x_1^2} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2\partial x_1} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n\partial x_1} f(\mathbf{x})\\ \frac{\partial^2}{\partial x_1\partial x_2} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2^2} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n\partial x_2} f(\mathbf{x})\\ \vdots & \vdots & & \vdots \\ \frac{\partial^2}{\partial x_1\partial x_n} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2\partial x_n} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n^2} f(\mathbf{x}) \\ \end{bmatrix}.") Koska on kaksi kertaa jatkuvasti derivoituva, derivoinnin järjestystä voidaan vaihtaa, ja kyseinen matriisi on symmetrinen.
Koska on kaksi kertaa jatkuvasti derivoituva, derivoinnin järjestystä voidaan vaihtaa, ja kyseinen matriisi on symmetrinen.
Miksi Hessen matriisi kiinnostaa meitä? Kun gradientin avulla voidaan kirjoittaa lineaarinen (ensimmäisen asteen) approksimaatio funktiolle , niin Hessen matriisilla saadaan kvadraattinen tarkennus:  \approx f(\mathbf{x}) + \mathbf{h} \cdot \nabla f (\mathbf{x}) + \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T,") jossa (vaaka)vektori
jossa (vaaka)vektori ") on pieni.
on pieni.
Tämä kaava on itse asiassa ainoastaan uusi tapa kirjoittaa toisen kertaluvun Taylorin approksimaatio  :n muuttujan funktiolle. Muotoa
:n muuttujan funktiolle. Muotoa  oleva lauseke on
oleva lauseke on  -neliömatriisille
-neliömatriisille  niin kutsuttu neliömuoto, jossa
niin kutsuttu neliömuoto, jossa  on -pystyvektori.
on -pystyvektori.
Kirjoita kaava auki tapauksessa  !
!
Pisteessä, jossa  = 0") , on voimassa approksimaatio
, on voimassa approksimaatio  - f(\mathbf{x}) \approx \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T.") Tätä voidaan käyttää hyväksi mahdollisen ääriarvon luokittelussa pisteessä ajattelemalla, että
Tätä voidaan käyttää hyväksi mahdollisen ääriarvon luokittelussa pisteessä ajattelemalla, että  .
.
Matriisin (ja neliömuodon) definiittisyys
Symmetristä -matriisia sanotaan positiividefiniitiksi, jos sen kaikki ominaisarvot ovat positiivisia ja negatiividefiniitiksi, jos  on positiividefiniitti. Matriisin sanotaan olevan indefiniitti, jos sen kaikki ominaisarvot ovat nollasta poikkeavia ja sillä on vähintään yksi positiivinen sekä yksi negatiivinen ominaisarvo. Positiivi/negatiividefiniiteillä matriiseilla on monia samoja ominaisuuksia kuin positiivisilla/negatiivisilla reaaliluvuilla.
on positiividefiniitti. Matriisin sanotaan olevan indefiniitti, jos sen kaikki ominaisarvot ovat nollasta poikkeavia ja sillä on vähintään yksi positiivinen sekä yksi negatiivinen ominaisarvo. Positiivi/negatiividefiniiteillä matriiseilla on monia samoja ominaisuuksia kuin positiivisilla/negatiivisilla reaaliluvuilla.
Symmetrisen matriisin definiittiys tai indefiniittiys periytyy sitä vastaavalle neliömuodolle.
on positiividefiniitti 
 kaikilla nollasta poikkeavilla pystyvektoreilla
kaikilla nollasta poikkeavilla pystyvektoreilla  .
.
on negatiividefiniitti  kaikilla nollasta poikkeavilla pystyvektoreilla .
kaikilla nollasta poikkeavilla pystyvektoreilla .
on indefiniitti  saavuttaa sekä negatiivisia että positiivisia arvoja pystyvektorin vaihdellessa.
saavuttaa sekä negatiivisia että positiivisia arvoja pystyvektorin vaihdellessa.
muotoon  , jossa diagonaalimatriisi
, jossa diagonaalimatriisi  sisältää :n ominaisarvot.
sisältää :n ominaisarvot.
Toisen derivaatan testi monen muuttajan tapauksessa
Lause. Olkoon funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat kriittisen pisteen ympäristössä. Tällöin:
- Jos
") on positiividefiniitti, niin :llä on lokaali minimi pisteessä .
on positiividefiniitti, niin :llä on lokaali minimi pisteessä . - Jos on negatiividefiniitti, niin :llä on lokaali maksimi pisteessä .
- Jos on indefiniitti, niin on funktion satulapiste.
- Muussa tapauksessa testi ei anna tietoa funktiosta .
Lause seuraa approksimaatiosta  - f(\mathbf{x}) \approx \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T") kun . Väite täytyy nimittäin ainoastaan tarkastaa Hessen matriisin määräämälle neliömuodolle.
kun . Väite täytyy nimittäin ainoastaan tarkastaa Hessen matriisin määräämälle neliömuodolle.
Esimerkki
Etsitään ja luokitellaan funktion  = x^2y+y^2z+z^2-2x") kriittiset pisteet.
kriittiset pisteet.
Yhtälöt kriittisille pisteille ovat \begin{align*} 0 &= f_{x}(x,y,z)=2xy-2,\\ 0 &= f_{y}(x,y,z)=x^2+2yz,\\ 0 &= f_{z}(x,y,z)=y^2+2z.\\ \end{align*} Nämä yhtälöt ratkaisemalla nähdään, että funktion ainoa kriittinen piste on ") .
.
Lasketaan Hessen matriisi ![H_f(1,1,-1/2)=\left [ \begin{smallmatrix} 2 & 2 & 0 \\ 2 & -1 & 2 \\ 0 & 2 & 2 \end{smallmatrix} \right ]](https://mycourses.aalto.fi/filter/tex/pix.php/67e1c90e30413fa189c4208b87d24fc9.gif "H_f(1,1,-1/2)=\left [ \begin{smallmatrix} 2 & 2 & 0 \\ 2 & -1 & 2 \\ 0 & 2 & 2 \end{smallmatrix} \right ]") ja lasketaan matriisin ominaisarvot vaikkapa MATLABilla
ja lasketaan matriisin ominaisarvot vaikkapa MATLABilla
>> a = [2 2 0 ; 2 -1 2 ; 0 2 2]
a =
2 2 0
2 -1 2
0 2 2
>> eig(a)
ans =
-2.7016
2.0000
3.7016
Niinpä funktiolla on satulapiste pisteessä .