Differentiaali- ja integraalilaskenta 2
| Site: | MyCourses |
| Course: | MS-A0201 - Differentiaali- ja integraalilaskenta 2 (TFM), Luento-opetus, 9.1.2024-19.2.2024 |
| Book: | Differentiaali- ja integraalilaskenta 2 |
| Printed by: | Guest user |
| Date: | Wednesday, 11 December 2024, 10:29 AM |
1. Taso- ja avaruuskäyrät
1.1. Parametrisointi
Parametrisointi
Muodollisesti käyrällä tarkoitetaan parametrisoitua joukkoa  , joka voidaan esittää muodossa
, joka voidaan esittää muodossa
 : t\in I\rbrace = \mathbf{r}(I) = \mathbf{r}\text{:n arvojoukko},") missä
missä  on väli ja funktio
on väli ja funktio  on jatkuva.
Vektoriarvoisen funktion
on jatkuva.
Vektoriarvoisen funktion  jatkuvuus tarkoittaa, että sen kaikki koordinaattifunktiot ovat jatkuvia missä tahansa kantaesityksessä.
jatkuvuus tarkoittaa, että sen kaikki koordinaattifunktiot ovat jatkuvia missä tahansa kantaesityksessä.
Funktio ") on eräs käyrän
on eräs käyrän  parametrisointi ja
parametrisointi ja  on tätä parametrisointia vastaava parametriväli.
Väli voi olla avoin
on tätä parametrisointia vastaava parametriväli.
Väli voi olla avoin ") , suljettu
, suljettu ![[a,b]](https://mycourses.aalto.fi/filter/tex/pix.php/2c3d331bc98b44e71cb2aae9edadca7e.gif "[a,b]") tai puoliavoin
tai puoliavoin ![(a,b],\,[a,b)](https://mycourses.aalto.fi/filter/tex/pix.php/bf492f2250f45ec12514122fc88339c6.gif "(a,b],\,[a,b)") ja myös rajoittamaton.
ja myös rajoittamaton.
Avaruuskäyrän ( ) parametrisointi voidaan antaa muodossa
) parametrisointi voidaan antaa muodossa
=(x(t),y(t),z(t)) \in \mathbb{R}^3, \text{ kun } t\in I.") Vaihtoehtoisesti voidaan myös käyttää koordinaattimuotoa
Vaihtoehtoisesti voidaan myös käyttää koordinaattimuotoa
=\begin{cases}x=x(t),\\y=y(t),\qquad t\in I\\z=z(t),\end{cases}") tai vektorimuotoa
tai vektorimuotoa
 =x(t)\mathbf{i}+y(t)\mathbf{j}+z(t)\mathbf{k},") jossa
jossa , \mathbf{j} = (0,1,0),") ja
ja ") ovat
ovat  :n luonnolliset kantavektorit. Myös pystyvektoriesitys
:n luonnolliset kantavektorit. Myös pystyvektoriesitys ![[x(t),y(t),z(t)]^T](https://mycourses.aalto.fi/filter/tex/pix.php/ac191007218c1cf472a6ef725b1f7043.gif "[x(t),y(t),z(t)]^T") voi olla hyödyllinen, jos parametrisointiin halutaan soveltaa matriisioperaatioita kuten kiertoja tai peilauksia.
voi olla hyödyllinen, jos parametrisointiin halutaan soveltaa matriisioperaatioita kuten kiertoja tai peilauksia.
Edellä funktion jatkuvuus tarkoittaa siis koordinaattifunktioiden  jatkuvuutta parametrivälillä .
jatkuvuutta parametrivälillä .
Huomautus. Samalla käyrällä on useita eri parametrisointeja. Miksi? Kuinka pääset yhdestä parametrisoinnista toiseen?
Esimerkki, suora tasossa
Kahden  -tason pisteen
-tason pisteen ") ja
ja ") kautta kulkeva suora voidaan parametrsioida
kautta kulkeva suora voidaan parametrsioida
 = \begin{cases} x(t)=(1-t)x_0+tx_1 \\
y(t)=(1-t)y_0+ty_1, \end{cases} \text{ kun } t\in I=(-\infty,\infty).") Havaitaan, että
Havaitaan, että =(x_0,y_0)\quad \text{ ja }\quad \mathbf{r}(t=1)=(x_1,y_1),") joten valitsemalla
parametriväliksi
joten valitsemalla
parametriväliksi ![I=[0,1]](https://mycourses.aalto.fi/filter/tex/pix.php/e56ebb3d9782176e00be7a6f25e2f8df.gif "I=[0,1]") saadaan pisteitä
saadaan pisteitä  ja
ja  yhdistävä jana.
yhdistävä jana.
Esimerkki, reaalifunktion kuvaaja
Jatkuvan funktion ![f\colon[a,b]\rightarrow\mathbb{R}](https://mycourses.aalto.fi/filter/tex/pix.php/f512365dad0a1a2382aa289ee8bfceea.gif "f\colon[a,b]\rightarrow\mathbb{R}") kuvaaja
kuvaaja ") voidaan ajatella -tason käyränä. Tämä käyrä voidaan parametrisoida
voidaan ajatella -tason käyränä. Tämä käyrä voidaan parametrisoida
 =\begin{cases} x(t)=t \\
y(t)=f(t), \end{cases}") missä
missä ![t\in[a,b]](https://mycourses.aalto.fi/filter/tex/pix.php/37b02e50d3262a530368502875a76e1c.gif "t\in[a,b]") . Tai vastaavasti vektorimuodossa
. Tai vastaavasti vektorimuodossa
 =x(t)\mathbf{i}+y(t)\mathbf{j}= t\mathbf{i}+f(t)\mathbf{j}.")
Esimerkki, Helix-käyrä eli kierrejousi
Helix-käyrä eli kierrejousi voidaan parametrisoida
=\begin{cases} x(t)=a\cos t, \\
y(t)=a\sin t, \qquad t\in I \\
z(t)=bt, \end{cases}") missä
missä  ovat parametreja. Parametri
ovat parametreja. Parametri  on jousen säde ja parametria
on jousen säde ja parametria  voidaan ajatella jousen venymänä.
voidaan ajatella jousen venymänä.
Vaihtoehtoisesti voidaan tietysti tässäkin käyttää myös vektorimuotoa
=x(t)\mathbf{i}+y(t)\mathbf{j}+z(t)\mathbf{k}
=a\cos t\mathbf{i}+a\sin t\mathbf{j}+bt\mathbf{k}.")
Suunta
Usein parametriväli on suljettu väli ![I=[a,b]](https://mycourses.aalto.fi/filter/tex/pix.php/aa922a30ce1173792a5bbaaeec5dd22c.gif "I=[a,b]") . On lisäksi mahdollista, että
. On lisäksi mahdollista, että  tai
tai  .
.
Parametrisointi määrää käyrälle positiivisen suunnan, jolloin ") on käyrän alkupiste ja
on käyrän alkupiste ja ") sen päätepiste.
Käyrää, jonka alku- ja päätepiste ovat samoja kutsutaan umpinaiseksi (engl. 'closed').
sen päätepiste.
Käyrää, jonka alku- ja päätepiste ovat samoja kutsutaan umpinaiseksi (engl. 'closed').
Voidaan muodostaa myös vastakkainen parametrisointi, jossa käyrä pysyy samana, mutta sen kulkusuunta vaihtuu. Tällöin myös parametrisointiin liittyvät alku- ja päätepiste vaihtuvat toisikseen.
Esimerkiksi tapauksessa ![\mathbf{r}\colon[0,1]\rightarrow C](https://mycourses.aalto.fi/filter/tex/pix.php/3134a15d54433f472a41b7dfaaa47509.gif "\mathbf{r}\colon[0,1]\rightarrow C") vastakkainen parametrisointi
vastakkainen parametrisointi  saadaan helposti kaavalla
saadaan helposti kaavalla
![\mathbf{r}_{-}(t)=\mathbf{r}(1-t), \quad t\in [0,1].](https://mycourses.aalto.fi/filter/tex/pix.php/1c2a838f4035abc9bda4820175b2d786.gif "\mathbf{r}_{-}(t)=\mathbf{r}(1-t), \quad t\in [0,1].")
Esimerkki, ympyrän kehä tasossa
Olkoon ja  . -keskisen ja
. -keskisen ja  -säteisen ympyrän kehän parametrisoinniksi saadaan
-säteisen ympyrän kehän parametrisoinniksi saadaan
 =\begin{cases}x(t)=x_0+r_0\cos t,\\ y(t) = y_0+r_0\sin t.\end{cases}") Jos halutaan parametrisoida koko kehä, voidaan parametriväliksi valita esimerkiksi
Jos halutaan parametrisoida koko kehä, voidaan parametriväliksi valita esimerkiksi ![[0,2\pi]](https://mycourses.aalto.fi/filter/tex/pix.php/1cc5fb6d3b10cf0b4029e23d46fa7fc0.gif "[0,2\pi]") tai
tai ![[-\pi,\pi]](https://mycourses.aalto.fi/filter/tex/pix.php/a5d4b5c6dcadd17bce3289ba1891d927.gif "[-\pi,\pi]") .
Lisäksi havaitaan, että
.
Lisäksi havaitaan, että =\mathbf{r}(2\pi)=(x_0+r_0,0)") ja
ja =\mathbf{r}(\pi)=(x_0-r_0,0),") joten käyrä on umpinainen.
joten käyrä on umpinainen.
Suunnistus voidaan vaihtaa päinvastaiseksi korvaamalla  parametrisoinnissa. Tällöin
parametrisoinnissa. Tällöin =\cos t") ,
, =-\sin t") ja
ja
=\begin{cases}x(t)=x_0+r_0\cos t,\\ y(t)=y_0-r_0\sin t.\end{cases}")
Implisiittinen muoto
Tasokäyrän yhtälö voidaan usein ilmaista myös implisiittisessä muodossa =0") , missä
, missä  on jokin kahden muuttujan lauseke.
Konkreettisia esimerkkejä ovat funktion kuvaaja , joka voidaan määritellä muodossa
on jokin kahden muuttujan lauseke.
Konkreettisia esimerkkejä ovat funktion kuvaaja , joka voidaan määritellä muodossa =y-f(x)=0") , ja
, ja  -säteinen ympyrä
-säteinen ympyrä =x^2+y^2-R^2=0") .
.
Huomautus. Yleisessä tapauksessa yhtälön määräämä tasojoukko voi olla hyvin yllättävän näköinen.
Jos esimerkiksi  on mikä tahansa suljettu tasojoukko (reunapisteet kuuluvat joukkoon), niin funktio
on mikä tahansa suljettu tasojoukko (reunapisteet kuuluvat joukkoon), niin funktio
=\text{ pisteen } (x,y) \text{ pienin etäisyys joukosta } A")
^{2}+(y-y_{0})^2} : (x_{0},y_{0})\in A\big\}") on jatkuva, mutta yhtälö esittää koko alkuperäistä joukkoa
on jatkuva, mutta yhtälö esittää koko alkuperäistä joukkoa  .
.
1.2. Tangenttivektori
Käyrän tangentti
Tarkastellaan 3-ulotteista parametrisointia , joka on derivoituva.
Tämä tarkoittaa, että vektorin jokaisen koordinaattifunktion täytyy olla derivoituva.
Parametriväliä ![[t,t+\Delta t]](https://mycourses.aalto.fi/filter/tex/pix.php/e9ceeb8058726ba0a6fb37e1363a2cb3.gif "[t,t+\Delta t]") vastaava käyrän sekantti on vektori
vastaava käyrän sekantti on vektori
 - \mathbf{r}(t).") Kun
Kun  , niin
, niin  kääntyy yhä enemmän käyrän tangentin suuntaiseksi, mutta samalla sen pituus kutistuu kohti nollaa.
Skaalamalla kertoimella
kääntyy yhä enemmän käyrän tangentin suuntaiseksi, mutta samalla sen pituus kutistuu kohti nollaa.
Skaalamalla kertoimella  saadaan kuitenkin erotusosamäärää vastaava lauseke, josta nähdään, että raja-arvo
saadaan kuitenkin erotusosamäärää vastaava lauseke, josta nähdään, että raja-arvo
 = \lim_{\Delta t\rightarrow 0} \frac{\Delta \mathbf{r}}{\Delta t}") on olemassa ja se voidaan käytännössä laskea kaavalla
on olemassa ja se voidaan käytännössä laskea kaavalla
 = x'(t)\mathbf{i}+y'(t)\mathbf{j}+z'(t)\mathbf{k}.") Vektorin
Vektorin  ensimmäinen koordinaatti on nimittäin
ensimmäinen koordinaatti on nimittäin
-x(t)}{\Delta t} \longrightarrow x'(t), \text{ kun }\Delta t \rightarrow 0,") ja samoin käy myös muissa koordinaateissa. Tämän vuoksi määritelmä näyttää järkevältä.
ja samoin käy myös muissa koordinaateissa. Tämän vuoksi määritelmä näyttää järkevältä.
Määritelmä. Jos käyrällä  on derivoituva parametrisointi , niin pisteessä
on derivoituva parametrisointi , niin pisteessä =(x(t),y(t),z(t))") vektori
vektori
=x'(t)\mathbf{i}+y'(t)\mathbf{j}+z'(t)\mathbf{k}") on käyrän tangenttivektori. Tason tapauksessa
on käyrän tangenttivektori. Tason tapauksessa  -koordinaatti jää tietysti pois.
-koordinaatti jää tietysti pois.
Fysikaalisessa tulkinnassa =\mathbf{r}'(t)") on käyrää pitkin liikkuvan kappaleen hetkellinen nopeus ja
on käyrää pitkin liikkuvan kappaleen hetkellinen nopeus ja \|") kappaleen vauhti hetkellä
kappaleen vauhti hetkellä  . Lisäksi
. Lisäksi
=\mathbf{v}'(t)=\mathbf{r}''(t)") on kappaleen hetkellinen kiihtyvyys.
on kappaleen hetkellinen kiihtyvyys.
 = \begin{cases}\\ \\ \\ \\\end{cases}")
=~")

=~")


Huomautus. Tangenttivektorin määritelmästä saadaan lisäksi hyödyllinen approksimaatio:
\approx \Delta\mathbf{r}/\Delta t \Leftrightarrow \Delta\mathbf{r}\approx \mathbf{r}'(t)\Delta t, \text{ kun } \Delta t\approx 0.") Muistisääntö: Siirtymä on suunnilleen sama kuin alkunopeus kertaa aikavälin pituus.
Muistisääntö: Siirtymä on suunnilleen sama kuin alkunopeus kertaa aikavälin pituus.
Esimerkki
Sykloidi kuvaa vierivään renkaaseen tarttuneen hiukkasen ratakäyrää. Se voidaan parametrisoida kulman avulla muodossa
=\begin{cases}x(t)=a(t-\sin t)\\ y(t)=a(1-\cos t).\end{cases}") Tangenttivektoriksi saadaan tällöin
Tangenttivektoriksi saadaan tällöin
 = a(1-\cos t)\mathbf{i}+a\sin t\mathbf{j},") ja edelleen voidaan ratkaista kiihtyvyys
ja edelleen voidaan ratkaista kiihtyvyys
=\mathbf{r}''(t)=a\sin t\mathbf{i} + a\cos t\mathbf{j}.") Tästä seuraa
Tästä seuraa \| = \lvert a\rvert =") tasaisen pyörimisliikkeen kiihtyvyys.
tasaisen pyörimisliikkeen kiihtyvyys.
Huomautus. Sykloidin parametrisoinnissa =\overline{0}") , eli hetkellinen nopeus on nolla (niissä kohdissa, joissa hiukkanen koskettaa vierimisalustaa, vrt. yllä.).
Tällöin käyrän suunta voi muuttua jyrkästi, vaikka sen parametrisointi onkin jatkuvasti derivoituva.
, eli hetkellinen nopeus on nolla (niissä kohdissa, joissa hiukkanen koskettaa vierimisalustaa, vrt. yllä.).
Tällöin käyrän suunta voi muuttua jyrkästi, vaikka sen parametrisointi onkin jatkuvasti derivoituva.
1.3. Kaarenpituus
Kaarenpituus
Olkoon ![\mathbf{r}\colon[a,b]\rightarrow\mathbb{R}^n](https://mycourses.aalto.fi/filter/tex/pix.php/ae71efff2bf5119390c4e5f06578200d.gif "\mathbf{r}\colon[a,b]\rightarrow\mathbb{R}^n") käyrän jatkuvasti derivoituva parametrisointi.
Jos käyrää approksimoidaan sekanteista muodostetulla murtoviivalla ja annetaan approksimaation tihentyä, voidaan havaita murtoviivan pituuden suppenevan kohti kaaren pituutta
käyrän jatkuvasti derivoituva parametrisointi.
Jos käyrää approksimoidaan sekanteista muodostetulla murtoviivalla ja annetaan approksimaation tihentyä, voidaan havaita murtoviivan pituuden suppenevan kohti kaaren pituutta ") .
.
Kaarenpituus (tai käyränpituus) voidaankin määrittää integraalina
=\int_a^b \|\mathbf{r}'(t)\|\,dt,") missä merkintä
missä merkintä  tarkoittaa vektorin (euklidista) normia eli pituutta avaruudessa
tarkoittaa vektorin (euklidista) normia eli pituutta avaruudessa  . Tapauksessa
. Tapauksessa  on siis
on siis \| =\sqrt{x'(t)^2+y'(t)^2}") .
.
Perustelu. Olkoot  välin ositus. Tällöin vektorien
välin ositus. Tällöin vektorien ") ja
ja ") välisen sekanttivektorin lauseke on
välisen sekanttivektorin lauseke on
 - \mathbf{r}(t_{k-1})") (vrt. aiempaan määritelmään, kun
(vrt. aiempaan määritelmään, kun  ).
).
Toisaalta sekanttivektorien pituudelle pätee approksimaatio
\|(t_{k}-t_{k-1}),") joten kaarenpituuden approksimaatioksi
joten kaarenpituuden approksimaatioksi  kappaleella sekanttivektoreita saadaan
kappaleella sekanttivektoreita saadaan
 \approx \sum_{k=1}^{n}\|\Delta\mathbf{r}_{k}\| \approx \sum_{k=1}^{n}\|\mathbf{r}'(t_{k-1})\|(t_{k}-t_{k-1}).") Vaaditaan lisäksi, että jokaisen jakovälin pituus
Vaaditaan lisäksi, että jokaisen jakovälin pituus  suppenee kohti nollaa, kun
suppenee kohti nollaa, kun  , jolloin edellinen lauseke on funktion
, jolloin edellinen lauseke on funktion
\|") Riemannin summa. Toisaalta, kun jakovälejä tihennetään, lähestyy approksimaatio kaaren todellista pituutta.
Näin ollen integraalin määritelmästä seuraa
Riemannin summa. Toisaalta, kun jakovälejä tihennetään, lähestyy approksimaatio kaaren todellista pituutta.
Näin ollen integraalin määritelmästä seuraa
 = \lim_{n\to\infty}\sum_{k=1}^{n}\|\mathbf{r}'(t_{k-1})\|(t_{k}-t_{k-1}) = \int_{a}^{b}\|\mathbf{r}'(t)\|\,dt.")
Jos käyrän parametrisointi on ainoastaan paloittain jatkuvasti derivoituva, saadaan koko käyrän kaarenpituus laskemalla osien kaarenpituudet yhteen.
Vaikka käyrällä onkin aina äärettömän monta eri parametrisointia, voidaan osoittaa, ettei kaarenpituus riipu (injektiivisen) parametrisoinnin valinnasta eikä suunnasta.
Esimerkki
Määritetään Helix-käyrän =(\cos t,\sin t,t)") kaarenpituus parametrivälillä
kaarenpituus parametrivälillä ![t\in[0,2\pi]](https://mycourses.aalto.fi/filter/tex/pix.php/fe633d652f3e72a8166a95d781b83845.gif "t\in[0,2\pi]") . Tangenttivektoriksi saadaan
. Tangenttivektoriksi saadaan
= \mathbf{i}(-\sin t) + \mathbf{j}\cos t + \mathbf{k},") joten
joten
\| = \sqrt{((-\sin t)^2+\cos^2t+1)}=\sqrt{2}.") Kaarenpituudeksi saadaan
Kaarenpituudeksi saadaan
\|dt = 2\sqrt{2}\pi.")
Esimerkki
Johdetaan kaava funktion kuvaajan ") kaarenpituudelle välillä . Asetetaan
kaarenpituudelle välillä . Asetetaan =(t, f(t))") , kun . Tällöin
, kun . Tällöin
=(1,f'(t))\quad\text{ ja }\quad \|\mathbf{r}'(t)\| = \sqrt{1+f'(t)^2},") joten kaarenpituudeksi saadaan
joten kaarenpituudeksi saadaan
^2}\,dt.")
Huomautus. Kaarenpituutta voidaan tutkia myös sellaisille käyrille, joiden parametrisointi on muodostettu rajoittamattomalla välillä tai käyrä on "rajoittamaton" tai "itsensä päälle laskostuva" avoimen parametrivälinsä päätepisteen läheisyydessä. Kaarenpituusintegraalista tulee tällöin epäoleellinen. Jos tämä integraali on suppeneva, niin käyrää kutsutaan suoristuvaksi.
Esimerkki
Olkoot käyrällä parametrisointi =(e^{-t},e^{-t})") , kun
, kun  . Lasketaan tälle kaarenpituus.
. Lasketaan tälle kaarenpituus.
Tangenttivektorin =(-e^{-t},-e^{-t})") pituus on
pituus on \|=e^{-t}\sqrt{2}") , joten kaarenpituudeksi saadaan nyt
, joten kaarenpituudeksi saadaan nyt
\|\,dt = \int_{0}^{\infty}e^{-t}\sqrt{2}\,dt = \sqrt{2}.")
2. Usean muuttujan funktiot
Usean muuttujan funktiot
Usean muuttujan reaaliarvoisella funktiolla tarkoitetaan funktiota  , missä
, missä  ,
,  on funktion
määrittelyjoukko. Tällainen funktio siis liittää reaalisiin parametreihin
on funktion
määrittelyjoukko. Tällainen funktio siis liittää reaalisiin parametreihin  reaaliluvun
reaaliluvun ") .
Joskus (erityisesti fysiikassa) tällaista funktiota sanotaan skalaarikentäksi.
.
Joskus (erityisesti fysiikassa) tällaista funktiota sanotaan skalaarikentäksi.
Esimerkiksi kaava =\pi r^2h") määrittelee kahden muuttujan
määrittelee kahden muuttujan  funktion. Tämän funktion arvo on sylinterin tilavuus, kun
funktion. Tämän funktion arvo on sylinterin tilavuus, kun  on sen säde ja
on sen säde ja  korkeus. Tähän sovellukseen liittyvä funktion määrittelyjoukko on tason ensimmäinen neljännes,
korkeus. Tähän sovellukseen liittyvä funktion määrittelyjoukko on tason ensimmäinen neljännes,
\in \mathbb{R}^2 : r\ge0,\,h\ge 0\},") mutta funktion määräävä matemaattinen kaava on kuitenkin määritelty ja mielekäs kaikilla
mutta funktion määräävä matemaattinen kaava on kuitenkin määritelty ja mielekäs kaikilla \in \mathbb{R}^2") , siis myös negatiivisilla luvuilla.
, siis myös negatiivisilla luvuilla.
=-\frac{6x}{2+x^2+y^2}")
=x^2-y^2")
\in D \mid f(x,y)=c\}")
 \in D: f(x,y,z)=c\}")
=-\frac{6x}{2+x^2+y^2}")





=L, \quad \text{missä } \textbf{x} = (x_1,\ldots,x_n)\in D,")

")
 -L|")




")


 =L")
 =M")
 \pm g(\textbf{x})\big) = L \pm M.")
 g(\textbf{x}) = LM.")
}{g(\textbf{x})} = \frac{L}{M},\text{ jos }M \neq 0.")
")
\to \mathbb{R}")
\big) = F(L).")
![\textbf{r}_1,\textbf{r}_2\colon [a,b]\to D\cup \{\textbf{y}_0\}](https://mycourses.aalto.fi/filter/tex/pix.php/99975a7d724c4ae4a075f28f977b7fc8.gif "\textbf{r}_1,\textbf{r}_2\colon [a,b]\to D\cup \{\textbf{y}_0\}")
=\textbf{r}_2(b)=\textbf{y}_0")
\big) \neq \lim_{t\to b} f\big(\textbf{r}_2(t)\big),")
 = \frac{2xy}{x^2+y^2}.")
=(t,0)")
 = \lim_{t\to0^+}\frac{2t\cdot 0}{t^2+0^2} = 0.")
=(t,t)")
 = \lim_{t\to0^+}\frac{2t\cdot t}{t^2+t^2} = \lim_{t\to0^+}\frac{2t^2}{2t^2} = 1.")
 = \frac{2x^2y}{x^4+y^2}")
=(t,kt)")
 = \frac{2kt^3}{t^4+k^2t^2} = \frac{2kt}{t^2+k^2} \to 0, \text{ kun } t\to 0.")
 = (t,t^2)")
 = \lim_{t\to0}\frac{2t^4}{t^4+t^4} = 1.")
\to(0,0)} \frac{x^2y}{x^2+y^2} = 0.")

-0\right| = \left|\frac{x^2y}{x^2+y^2}\right|\leq |y|\leq \sqrt{x^2+y^2} \to 0, \text{ kun } (x,y)\to(0,0).")



 = f(\textbf{x}_0).")
2.1. Osittaisderivaatta
Avoin joukko
Avoimessa joukossa voidaan jokaisesta pisteestä siirtyä ainakin lyhyt etäisyys kaikkiin mahdollisiin suuntiin. Tällaisessa joukossa määritellyn funktion arvojen muutosta voidaan siis tutkia kaikissa eri suunnissa, mikä on tärkeää funktion osittaisderivaattojen tapauksessa. Tarkemmin:Määritelmä
Joukko on avoin, jos sen jokaille pisteelle
on avoin, jos sen jokaille pisteelle  löytyy sellainen
löytyy sellainen  , että
, että
 = \{\mathbf{y}\in \mathbb{R}^n\mid \| \mathbf{y}-\mathbf{x}\| < r \}\subset D.") Joukko
Joukko ") on pallo(n sisäpuoli), jonka keskipiste on
on pallo(n sisäpuoli), jonka keskipiste on  ja säde .
Tasossa käytetään myös nimitystä kiekko, mutta merkintä
ja säde .
Tasossa käytetään myös nimitystä kiekko, mutta merkintä  = 'ball' sopii kaikkiin ulottuvuuksiin. Englannin kielen sana 'sphere' käännetään myös palloksi, mutta sekaannusten välttämiseksi siitä on matematiikassa toisinaan hyvä käyttää nimitystä "pallopinta".
= 'ball' sopii kaikkiin ulottuvuuksiin. Englannin kielen sana 'sphere' käännetään myös palloksi, mutta sekaannusten välttämiseksi siitä on matematiikassa toisinaan hyvä käyttää nimitystä "pallopinta".
Osittaisderivaatta
Olkoon , avoin ja
, avoin ja  funktio. Tällöin kaikille
funktio. Tällöin kaikille  funktion
funktion  osittaisderivaatta muuttujan
osittaisderivaatta muuttujan  suhteen on
suhteen on
 = \lim_{h\to0}\frac{f(\mathbf{x} + h\mathbf{e}_j) -f(\mathbf{x})}{h},") jos kyseinen raja-arvo on olemassa. Tässä
jos kyseinen raja-arvo on olemassa. Tässä  on
on  :s yksikkökantavektori.
:s yksikkökantavektori.
Huom. Erityisesti tapauksissa  ja tai käytetään osittaisderivaatoille yleensä merkintöjä
ja tai käytetään osittaisderivaatoille yleensä merkintöjä
 = f_{x}(\mathbf{x}),\quad\frac{\partial}{\partial x_{2}}f(\mathbf{x}) = f_{y}(\mathbf{x})
\quad\text{ja}\quad \frac{\partial}{\partial x_{3}}f(\mathbf{x}) = f_{z}(\mathbf{x})")
") on
on
 = \lim_{h\to0}\frac{f(a+ h,b) -f(a,b)}{h}") ja
ja
 = \lim_{h\to0}\frac{f(a,b+h) -f(a,b)}{h}.")
Käytännössä osittaisderivointi jonkin muuttujan suhteen tapahtuu samaan tapaan kuin yhden muuttujan tapauksessa, muistetaan vain tulkita kaikki muut muuttujat ikään kuin vakioiksi.
Syy: Esimerkiksi kahden muuttujan funktiosta ") voidaan muodostaa yhden muuttujan
funktio
voidaan muodostaa yhden muuttujan
funktio =f(t,b)") kiinnittämällä muuttuja
kiinnittämällä muuttuja  . Tällöin funktion
. Tällöin funktion  tavallinen yhden muuttujan erotusosamäärä on sama lauseke kuin funktion erotusosamäärässä ensimmäisen muuttujan suhteen:
tavallinen yhden muuttujan erotusosamäärä on sama lauseke kuin funktion erotusosamäärässä ensimmäisen muuttujan suhteen:
 = \lim_{h\to0} \frac{g(a+h)-g(a)}{h} = \lim_{h\to0}\frac{f(a+ h,b) -f(a,b)}{h}
= f_x(a,b).")
Esimerkki
Olkoon funktio =x_{1}x_{2}") . Tällöin
. Tällöin
 = \lim_{h\to0}\frac{f(x_{1},x_{2}+h)-f(x_{1},x_{2})}{h}
= \lim_{h\to0}\frac{x_{1}(x_{2}+h)-x_{1}x_{2}}{h} = x_{1}.")
Esimerkki
Olkoon funktio  ,
, =x^2\sin y.") Sen osittaisderivaatat ovat
Sen osittaisderivaatat ovat
 = 2x\sin y
\quad \text{ ja }\quad
f_{y}(x,y) = x^2 \cos y.")
Merkintätavat osittaisderivaatoille
Funktion  osittaisderivaattaa muuttujan suhteen merkitään mm. seuraavilla tavoilla
osittaisderivaattaa muuttujan suhteen merkitään mm. seuraavilla tavoilla
 = \frac{\partial f}{\partial x_j}
= D_jf(x_1,\ldots,x_n) = \partial_{j}f(x_{1},\ldots,x_{n}).")
Tapauksessa usein kirjoitetaan ") , jolloin voidaan myös käyttää merkintöjä
, jolloin voidaan myös käyttää merkintöjä
=\frac{\partial z}{\partial x} \quad \text{ ja }\quad
f_{y}(x,y)=\frac{\partial z}{\partial y}.")
Osittaisderivaatalle käytetään erillistä symbolia  ("doo"), jotta se ei sekoittuisi tavalliseen derivaattaan.
Tähän palataan vähän myöhemmin ketjusäännön yhteydessä.
("doo"), jotta se ei sekoittuisi tavalliseen derivaattaan.
Tähän palataan vähän myöhemmin ketjusäännön yhteydessä.
Osittaisderivaatan arvo
Funktion osittaisderivaatan  arvoa pisteessä
arvoa pisteessä  merkitään
merkitään
\bigg|_{\mathbf{x}_0} = \frac{\partial z}{\partial x_j}\bigg|_{\mathbf{x}_0} = D_jf(\mathbf{x}_{0}) = \partial_{j}f(\mathbf{x}_{0}),") jossa muuttuja määritellään
jossa muuttuja määritellään ") .
.
Esimerkiksi, jos =u^2v") ja
ja  , niin
\begin{align}
f_{u}(\mathbf{w})&=f_{u}(x^2,xy) =\left.\bigg(\frac{\partial}{\partial u}f(u,v)\bigg)\right|_{(x^2,xy)} \\
&=2uv\Big|_{u=x^2,\,v=xy}= 2(x^2)(xy)=2x^3y.
\end{align}
, niin
\begin{align}
f_{u}(\mathbf{w})&=f_{u}(x^2,xy) =\left.\bigg(\frac{\partial}{\partial u}f(u,v)\bigg)\right|_{(x^2,xy)} \\
&=2uv\Big|_{u=x^2,\,v=xy}= 2(x^2)(xy)=2x^3y.
\end{align}
Esimerkki
Lasketaan
 kun
kun  . Tällöin saadaan
. Tällöin saadaan

Esimerkki
Etsitään ") , kun
, kun =e^{xy}\cos(x+y)") . Tästä saadaan
. Tästä saadaan
=ye^{xy}\cos(x+y)-e^{xy}\sin(x+y).") Siten
Siten
 = \pi e^0\cos(\pi)-e^0\sin(\pi) = -\pi.")
Ketjusäännön soveltaminen
Tavallisiin derivaattoihin liittyvä ketjusääntö
'(x)= f'\big(g(x)\big)g'(x)") on voimassa myös osittaisderivaattojen tapauksessa.
Jos esimerkiksi
on voimassa myös osittaisderivaattojen tapauksessa.
Jos esimerkiksi  ja
ja  niin
niin
\big) = f'\big(g(x,y)\big)g_{x}(x,y)") ja
ja
\big) = f'\big(g(x,y)\big)g_{y}(x,y).") Myöhemmin esitetään myös ketjusääntö monen muuttujan funktioille.
Myöhemmin esitetään myös ketjusääntö monen muuttujan funktioille.
Esimerkki
Osoitetaan, että derivoituva funktio  toteuttaa seuraavan osittaisdifferentiaaliyhtälön, kun
toteuttaa seuraavan osittaisdifferentiaaliyhtälön, kun ") :
:
 Ketjusäännön perusteella
Ketjusäännön perusteella
\bigg(\frac{1}{y}\bigg)
\text{ ja }
\frac{\partial z}{\partial y} =f'\bigg(\frac{x}{y}\bigg)\bigg(\frac{-x}{y^2}\bigg).") Siten
Siten
\bigg(x\cdot \frac{1}{y}+y\cdot\frac{-x}{y^2}\bigg)=0.")
Korkeammat osittaisderivaatat
Funktiolle  voidaan määritellä myös korkeampia osittaisderivaattoja.
Jos , niin saadaan esimerkiksi
voidaan määritellä myös korkeampia osittaisderivaattoja.
Jos , niin saadaan esimerkiksi
") ja
ja
.") Vastaavasti, jos
Vastaavasti, jos ") , saadaan vaikkapa
, saadaan vaikkapa
.")
Esimerkki
Etsitään funktion =x^3y^4") toiset osittaisderivaatat. Saadaan aluksi
toiset osittaisderivaatat. Saadaan aluksi
=3x^2y^4\quad\text{ ja }\quad
f_{y}(x,y)=4x^3y^3.") Siten
\begin{align*}
f_{xx}(x,y)&=\frac{\partial }{\partial x}3x^2y^4=6xy^4, \\
f_{yx}(x,y)&=\frac{\partial}{\partial x}4x^3y^3=12x^2y^3, \\
f_{xy}(x,y)&=\frac{\partial}{\partial y}3x^2y^4=12x^2y^3, \\
f_{yy}(x,y)&=\frac{\partial }{\partial y}4x^3y^3=12x^3y^2.
\end{align*}
Siten
\begin{align*}
f_{xx}(x,y)&=\frac{\partial }{\partial x}3x^2y^4=6xy^4, \\
f_{yx}(x,y)&=\frac{\partial}{\partial x}4x^3y^3=12x^2y^3, \\
f_{xy}(x,y)&=\frac{\partial}{\partial y}3x^2y^4=12x^2y^3, \\
f_{yy}(x,y)&=\frac{\partial }{\partial y}4x^3y^3=12x^3y^2.
\end{align*}
Huom. Edellisestä voidaan havaita, että =f_{yx}(x,y)") . Tämä ei ole sattumaa!
. Tämä ei ole sattumaa!
Jos funktio sekä sen osittaisderivaatat  ja
ja  ovat kaikki jatkuvia, niin
ovat kaikki jatkuvia, niin
 Toisin sanoen derivoimisjärjestyksellä ei ole tällöin väliä. Vastaava tulos pätee myös yleisesti kaikilla
Toisin sanoen derivoimisjärjestyksellä ei ole tällöin väliä. Vastaava tulos pätee myös yleisesti kaikilla  .
.
2.2. Tangenttitaso ja normaalisuora
Pinnan tangentti ja normaali
Yhden muuttujan tapauksessa derivaatan avulla voidaan löytää lauseke derivoituvan funktion tangentille annetussa pisteessä.
Normaali on kohtisuorassa tangenttia vastaan.
Pinnalle saadaan puolestaan kaksi tangenttivektoria pisteessä )") käyrien
käyrien )") ja
ja )") tangentteina:
tangentteina:
\mathbf{k} \quad\text{ ja }\quad
\mathbf{T}_2 = \mathbf{j} + f_{y}(a,b)\mathbf{k}.")
Pinnan (ylä)normaalivektori ") on kohtisuorassa
näitä molempia tangenttivektoreita vastaan. Siksi se saadaan ristitulona
\begin{align*}
\mathbf{N} &= \mathbf{T}_1\times \mathbf{T}_2 =
\begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
1 & 0 & f_{x}(a,b) \\
0 & 1 & f_{y}(a,b)
\end{vmatrix}
=-f_{x}(a,b)\mathbf{i} - f_{y}(a,b)\mathbf{j} + \mathbf{k}.
\end{align*}
Pinnan yksikkönormaali
on kohtisuorassa
näitä molempia tangenttivektoreita vastaan. Siksi se saadaan ristitulona
\begin{align*}
\mathbf{N} &= \mathbf{T}_1\times \mathbf{T}_2 =
\begin{vmatrix}
\mathbf{i} & \mathbf{j} & \mathbf{k} \\
1 & 0 & f_{x}(a,b) \\
0 & 1 & f_{y}(a,b)
\end{vmatrix}
=-f_{x}(a,b)\mathbf{i} - f_{y}(a,b)\mathbf{j} + \mathbf{k}.
\end{align*}
Pinnan yksikkönormaali  saadaan normaalista
saadaan normaalista  skaalaamalla sen pituudella:
skaalaamalla sen pituudella:
 sillä yllä olevan kaavan perusteella ei voi olla nollavektori.
sillä yllä olevan kaavan perusteella ei voi olla nollavektori.
Tangenttitaso
Olkoon  , ja
, ja \in D") .
Pinnan tangenttitaso pisteessä on aina kohtisuorassa normaalia vastaan
ja se kulkee pisteen
.
Pinnan tangenttitaso pisteessä on aina kohtisuorassa normaalia vastaan
ja se kulkee pisteen )") kautta. Merkitään pisteen
kautta. Merkitään pisteen  paikkavektoria
paikkavektoria  .
Tällaisen tason vektorit
.
Tällaisen tason vektorit  \in \mathbb{R}^3") toteuttavat yhtälön
toteuttavat yhtälön
 = 0,") sillä tason suuntaiset vektorin ovat kohtisuorassa normaalia vastaan.
Tangenttitasolle saadaan siis yhtälö
sillä tason suuntaiset vektorin ovat kohtisuorassa normaalia vastaan.
Tangenttitasolle saadaan siis yhtälö
(x-a) - f_{y}(a,b)(y-b)+1\cdot (z-f(a,b))=0 \Leftrightarrow z=f(a,b) + f_{x}(a,b)(x-a) + f_{y}(a,b)(y-b).")
Normaalisuoran yhtälöt
Normaalisuora pinnalle pisteessä )") on normaalivektorin
on normaalivektorin
 = -f_{x}(a,b)\mathbf{i} - f_{y}(a,b)\mathbf{j} + \mathbf{k}") suuntainen.
suuntainen.
Merkitään taas pisteen paikkavektoria . Tällöin normaalisuoran pisteet ovat pistejoukko
 \, : \, t \in \mathbb{R} \}.") Jos sekä
Jos sekä  \neq 0") ja
ja  \neq 0") , niin voidaan eliminoida parametri ja saadaan yhtälöt
, niin voidaan eliminoida parametri ja saadaan yhtälöt
} = \frac{y-b}{f_{y}(a,b)} = \frac{z-f(a,b)}{-1}.")
Esimerkki
Etsitään tangentti ja normaali pinnalle ") , kun
, kun  ja
ja  .
Tangentti ja normaali kulkevat pisteen
.
Tangentti ja normaali kulkevat pisteen ") kautta.
kautta.
Lasketaan osittaisderivaatat:
\text{ ja }
\frac{\partial z}{\partial y} = x\cos(xy).") Pisteessä
Pisteessä ") saadaan
saadaan
 Siten kyseisellä pinnalla on normaalivektori
Siten kyseisellä pinnalla on normaalivektori
 Tangenttitaso on
Tangenttitaso on
 + \frac{\pi}{6}(y+1).") Ja normaalisuoran yhtälöiksi saadaan
Ja normaalisuoran yhtälöiksi saadaan

Kaltevuuskulma
Pinnan kaltevuuskulma mitataan vaakatasosta, mutta se on sama kuin pinnan ylänormaalin ja
yksikkövektorin
mitataan vaakatasosta, mutta se on sama kuin pinnan ylänormaalin ja
yksikkövektorin  välinen kulma: piirrä poikkileikkauskuva! Näin ollen
välinen kulma: piirrä poikkileikkauskuva! Näin ollen

2.3. Gradientti ja suunnattu derivaatta
Gradientti
Olkoon  ,
,  , derivoituva pisteessä .
, derivoituva pisteessä .
Määritelmä. Funktion gradientti on vektori
\in\mathbb{R}^n.") Kaikki osittaisderivaatat lasketaan tutkittavassa pisteessä
Kaikki osittaisderivaatat lasketaan tutkittavassa pisteessä  .
.
Gradientti on tavallisen derivaatan oikea vastine usean muuttujan funktioille, koska se ottaa huomioon
kaikki osittaisderivaatat. Myöhemmin nähdään, että gradientti osoittaa siihen suuntaan, johon siirryttäessä
funktio kasvaa nopeimmin, vrt. esimerkiksi termi "lämpötilagradientti".
Se on vektoriarvoinen funktio  .
Tapauksessa voidaan kirjoittaa
.
Tapauksessa voidaan kirjoittaa
 Tapauksessa kolmas termi jää pois. Gradientti on Jacobin matriisin erikoistapaus
Tapauksessa kolmas termi jää pois. Gradientti on Jacobin matriisin erikoistapaus  , vrt. alla.
, vrt. alla.
Esimerkki
Olkoon =x^2+y^2") . Tällöin saadaan
. Tällöin saadaan  .
Erityisesti
.
Erityisesti ") on kohtisuorassa origokeskisen (yksikkö)ympyrän mielivaltaiseen pisteeseen
on kohtisuorassa origokeskisen (yksikkö)ympyrän mielivaltaiseen pisteeseen  ) piirrettyä tangenttisuoraa vastaan.
Tämä on erikoistapaus yleisemmästä tasa-arvokäyriä koskevasta ominaisuudesta.
) piirrettyä tangenttisuoraa vastaan.
Tämä on erikoistapaus yleisemmästä tasa-arvokäyriä koskevasta ominaisuudesta.
Tasa-arvokäyrät
Olkoon  vakio,
vakio,  ja
ja  funktio.
Tällöin joukko
funktio.
Tällöin joukko  : f(x,y)=c\}") on usein tasokäyrä. Kyseinen pistejoukko voi olla myös tyhjä (jos ei saa arvoa
on usein tasokäyrä. Kyseinen pistejoukko voi olla myös tyhjä (jos ei saa arvoa  ) tai vaikkapa koko taso (jos on vakio).
Mikäli joukko on tasokäyrä, sitä sanotaan funktion arvoon liittyväksi tasa-arvokäyräksi.
) tai vaikkapa koko taso (jos on vakio).
Mikäli joukko on tasokäyrä, sitä sanotaan funktion arvoon liittyväksi tasa-arvokäyräksi.
Esimerkiksi korkeuskäyrät kartalla ovat tasa-arvokäyriä
funktiolle, joka liittää kartalla olevaan pisteeseen ") sen korkeuden meren pinnasta.
sen korkeuden meren pinnasta.
Lause. Olkoon , ja derivoituva
pisteessä ja \neq \mathbf{0}.") Tällöin
Tällöin ") on kohtisuorassa pisteen kautta kulkevaa
funktion tasa-arvokäyrää (t.s., sen tangenttia) vasten.
on kohtisuorassa pisteen kautta kulkevaa
funktion tasa-arvokäyrää (t.s., sen tangenttia) vasten.
Seuraus: Jos piste on funktion paikallinen
ääriarvo (minimi tai maksimi), niin =\mathbf{0}") .
Gradientin nollakohta ei kuitenkaan välttämättä ole funktion ääriarvo.
Edes skalaarifunktion derivaatan nollakohta ei välttämättä ole minimi
eikä maksimi, kuten nähdään jos
.
Gradientin nollakohta ei kuitenkaan välttämättä ole funktion ääriarvo.
Edes skalaarifunktion derivaatan nollakohta ei välttämättä ole minimi
eikä maksimi, kuten nähdään jos  = x^3") .
.
Todistus. Olkoon ![I = [-1,1]](https://mycourses.aalto.fi/filter/tex/pix.php/f0ca2e6cb7cc0e84726a5ef5509d1cac.gif "I = [-1,1]") ja
ja \colon I \to \mathbb{R}^2") tasa-arvokäyrän sellainen parametrisointi,
että
tasa-arvokäyrän sellainen parametrisointi,
että =(a,b)") . Koska
. Koska =x(t)\mathbf{i} +y(t)\mathbf{j}") on tasa-arvokäyrä, kaikilla
on tasa-arvokäyrä, kaikilla  pätee
pätee ,y(t))=f(a,b)") eli vakio.
Ketjusäännöstä saadaan (koska vakiofunktion derivaatta on nolla)
eli vakio.
Ketjusäännöstä saadaan (koska vakiofunktion derivaatta on nolla)
,y(t)\big)x'(t) + f_{y}\big(x(t),y(t)\big)y'(t)=0.") Erityisesti pisteessä
Erityisesti pisteessä  tämä tarkoittaa, että
tämä tarkoittaa, että
\cdot \mathbf{r}'(0)=0,") eli toisin sanoen vektori
eli toisin sanoen vektori  ja tangentin suuntainen
ja tangentin suuntainen ") ovat kohtisuorassa.
ovat kohtisuorassa.
Suunnattu derivaatta
Edellinen tulos voidaan tulkita niin, että tasa-arvokäyrän tangentti antaa suunnan, johon edettäessä funktio ei kasva eikä vähene. Niinpä funktio kasvaa jyrkimmin gradienttinsa suuntaan, joka on tasa-arvokäyrän normaalivektori.
Muihin suuntiin liikuttessa kasvunopeuden antaa suunnattu derivaatta
 = \frac{dg}{dt}(0),
\text{ jossa } g(t) = f(a + t u_1, b + t u_2)") ja
ja  on yksikkösuuntavektori.
on yksikkösuuntavektori.
Lause. Olkoon  funktio, ja
funktio, ja  sellainen vektori, että
sellainen vektori, että  . Tällöin funktion suunnattu derivaatta suuntaan
. Tällöin funktion suunnattu derivaatta suuntaan  saadaan kaavasta
saadaan kaavasta
 = \mathbf{u} \cdot \nabla f(a,b).")
Esimerkki
Olkoon =y^4+2xy^3+x^2y^2") . Etsitään
. Etsitään ") , kun on
, kun on
 b)
b)  c)
c)  d)
d)  .
.Lasketaan
 = (2y^3+2xy^2)\mathbf{i} + (4y^3+6xy^2+2x^2y)\mathbf{j},")
 = 2\mathbf{i} + 4\mathbf{j}.") a)
a)  ja siten
ja siten /\sqrt{5}") . Saadaan
. Saadaan
=\frac{1}{\sqrt{5}}(\mathbf{i} +2\mathbf{j})\cdot (2\mathbf{i} + 4\mathbf{j}) = \frac{2+8}{\sqrt{5}}=2\sqrt{5}.")
Huomaa, että tässä ja ") ovat yhdensuuntaiset.
ovat yhdensuuntaiset.
b)  ja siten
ja siten /\sqrt{5}") . Saadaan
. Saadaan
=\frac{1}{\sqrt{5}}(\mathbf{j} -2\mathbf{i})\cdot (2\mathbf{i} + 4\mathbf{j}) = \frac{-4+4}{\sqrt{5}}=0.") Vektorit ja ovat siis kohtisuorassa.
Vektorit ja ovat siis kohtisuorassa.
c)  ja siten
ja siten  . Saadaan
. Saadaan
=\mathbf{i} \cdot (2\mathbf{i} + 4\mathbf{j}) = 2.") Tämä on sama kuin
Tämä on sama kuin ") .
.
d)  ja siten
ja siten /\sqrt{2}") . Saadaan
. Saadaan
=\frac{1}{\sqrt{2}}(\mathbf{i} +\mathbf{j})\cdot (2\mathbf{i} + 4\mathbf{j}) = \frac{2+4}{\sqrt{2}}=3\sqrt{2}.")
Huomaa, että  .
.
Määritelmä
Olkoon ja ") vektori, missä
jokainen funktion komponentti on funktio
vektori, missä
jokainen funktion komponentti on funktio  ja
ja
 .
Tällainen vektori määrittelee vektoriarvoisen funktion
.
Tällainen vektori määrittelee vektoriarvoisen funktion  , jota kutsutaan myös vektorikentäksi.
Usein käytetään merkintää
, jota kutsutaan myös vektorikentäksi.
Usein käytetään merkintää ") .
.
Vektoriarvoisia funktiota esiintyy usein mm. fysiikassa sellaisten suureiden yhteydessä, joilla on voimakkuus ja suunta (esimerkiksi nopeus- ja voimakentät).
Huomautus. Yllä :t ovat tässä vektorin  komponentteja (eivät siis osittaisderivaattoja).
komponentteja (eivät siis osittaisderivaattoja).
Vektoriarvoisen funktion derivointi
Derivaatan luonnollinen vastine vektoriarvoisen funktion ") tapauksessa on Jacobin matriisi
tapauksessa on Jacobin matriisi
 =
\begin{bmatrix}
\frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n}\\
\frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n}\\
\vdots & \vdots & & \vdots \\
\frac{\partial f_m}{\partial x_1} & \frac{\partial f_m}{\partial x_2} & \cdots & \frac{\partial f_m}{\partial x_n}.
\end{bmatrix}") Jos
Jos  , Jacobin matriisi on neliömatriisi ja sen
determinattia sanotaan funktion Jacobin determinantiksi
pisteessä . Tätä determinanttia tarvitaan kurssin loppuosassa.
, Jacobin matriisi on neliömatriisi ja sen
determinattia sanotaan funktion Jacobin determinantiksi
pisteessä . Tätä determinanttia tarvitaan kurssin loppuosassa.
Jacobin matriiseilla ketjusääntö voidaan kirjoittaa yleisessä muodossa
(\mathbf{x})= D\mathbf{f}\big(\mathbf{g}(\mathbf{x})\big)D\mathbf{g}(\mathbf{x}).")
Sovellus: implisiittifunktiolause
Oletetaan, että skalaarifunktiot }, F_{(2)}, \ldots , F_{(n)}") ovat derivoituvia. Tutkitaan yhtälöryhmää
ovat derivoituvia. Tutkitaan yhtälöryhmää
}(x_1,x_2,\ldots,x_m,y_1,y_2,\ldots,y_n)=0,\\
F_{(2)}(x_1,x_2,\ldots,x_m,y_1,y_2,\ldots,y_n)=0,\\
\vdots\\
F_{(n)}(x_1,x_2,\ldots,x_m,y_1,y_2,\ldots,y_n)=0,\\
\end{array}\right.") pisteen
pisteen ") lähellä.
Muuttujat
lähellä.
Muuttujat ") voidaan esittää muuttujien
voidaan esittää muuttujien
") funktioina pisteen lähellä, jos
funktion
funktioina pisteen lähellä, jos
funktion  = (F_{(1)},\ldots,F_{(n)})(\mathbf{y})") Jacobin
determinatti
Jacobin
determinatti
\Big|_{P_0} \neq 0.")
Esimerkki
Osoitetaan, että ") voidaan esittää muuttujien
voidaan esittää muuttujien ") funktiona systeemistä
funktiona systeemistä
 = xy^2+xzu + yv^2-3 = 0,\\
G(x,y,z,u,v) = x^3yz+2xv -u^2v^2-2 = 0,\\
\end{array}\right.") pisteen
pisteen ") lähellä.
lähellä.
Selvästi  = G(P_0) = 0") .
Muodostetaan Jacobin determinatti
.
Muodostetaan Jacobin determinatti
 Koska determinantti ei ole nolla,
voidaan kirjoittaa
Koska determinantti ei ole nolla,
voidaan kirjoittaa \quad \text{ ja }\quad v = v(x,y,z)") kolmen muuttujan funktioina. Kaavoja näille funktioille ei kuitenkaan voida yleensä antaa.
kolmen muuttujan funktioina. Kaavoja näille funktioille ei kuitenkaan voida yleensä antaa.
2.4. Lineaarinen approksimaatio ja differentiaali
Approksimaatiot
Yksiulotteisessa tapauksessa muotoa olevan funktion kuvaajan tangenttisuora ") pisteessä saadaan kaavasta
pisteessä saadaan kaavasta
 = f(a) + f'(a)(x-a).") Tangenttisuoran lauseke antaa myös tavan approksimoida funktiota pisteen läheisyydessä:
Tangenttisuoran lauseke antaa myös tavan approksimoida funktiota pisteen läheisyydessä: \approx L(x)") .
.
Miksi approksimaatiota tarvitaan, jos kerran tietokone voi laskea nopeasti ja tarkasti?
Kun halutaan löytää "peukalosääntö" päässälaskun helpottamiseksi ja ymmärryksen lisäämiseksi.
Kun funktio on olemassa ainoastaan taulukoituna, esimerkiksi
mittaustuloksista.
Lineaariset approksimaatiot usean muuttujan funktioille
Tapauksessa saadaan funktiota approksimoiva tangenttitaso ") , joka voidaan muodostaa osittaisderivaattojen avulla kaavasta
, joka voidaan muodostaa osittaisderivaattojen avulla kaavasta
 \approx L(x,y) = f(a,b)+f_{x}(a,b)(x-a)+f_{y}(a,b)(y-b).") Kolmen muuttujan tapauksessa saadaan samannäköinen
approksimaatio
Kolmen muuttujan tapauksessa saadaan samannäköinen
approksimaatio
 \approx L(x,y,z) = f(a,b,c)+f_{x}(a,b,c)(x-a)+f_{y}(a,b,c)(y-b)+f_z(a,b,c)(z-c).")
Esimerkki
Etsitään lineaarinen approksimaatio funktiolle
=\sqrt{2x^2+e^{2y}}") pisteessä
pisteessä ") , ja arvioidaan funktion arvoa pisteessä
, ja arvioidaan funktion arvoa pisteessä ") .
.
Saadaan =3") . Funktion osittaisderivaatat ovat
. Funktion osittaisderivaatat ovat
 = \frac{2x}{\sqrt{2x^2+e^{2y}}}, \quad f_{x}(2,0)=\frac{4}{3}.") ja
ja
 = \frac{e^{2y}}{\sqrt{2x^2+e^{2y}}}, \quad f_{y}(2,0)=\frac{1}{3}.") Siten
Siten
=3 +\frac{4}{3}(x-2)+\frac{1}{3}(y-0).") Haluttu approksimaatio siis on
Haluttu approksimaatio siis on
 \approx L(2.2,-0.2) = 3 +\frac{4}{3}(2.2-2)+\frac{1}{3}(-0.2-0)=3.2.") Vertailun vuoksi funktion todellinen arvo pisteessä on noin
Vertailun vuoksi funktion todellinen arvo pisteessä on noin  .
.
Differentiaali
Lineaarisen approksimaation lauseketta kutsutaan funktion differentiaaliksi (tai kokonaisdifferentiaaliksi) ja se voidaan kirjoittaa kahden muuttujan tapauksessa muodossa
 -f(x,y) = f_x\, \Delta x + f_y\, \Delta y +\text{virhetermi}.") Differentiaalia merkitään
Differentiaalia merkitään  . Tarkasti ottaen merkintään liittyy sekä tutkittava piste että siirtymävektori.
. Tarkasti ottaen merkintään liittyy sekä tutkittava piste että siirtymävektori.
on jatkuvat osittaisderivaatat, niin differentiaaliin liittyvä virhetermi voidaan esittää muodossa ") , jossa
, jossa  \to 0") , kun
, kun  .
Tässä siis
.
Tässä siis ") ja
ja ") . Yleinen differentiaalikaava -ulotteisessa tapauksessa on muotoa
. Yleinen differentiaalikaava -ulotteisessa tapauksessa on muotoa
- f(\mathbf{r}) = \nabla f (\mathbf{r})\cdot \Delta \mathbf{r}
+ \|\Delta \mathbf{r}\| \varepsilon (\mathbf{r}, \Delta \mathbf{r}).") Makroskooppisen virheen arviointiin voidaan käyttää approksimaatiota
Makroskooppisen virheen arviointiin voidaan käyttää approksimaatiota
\cdot \Delta \mathbf{r}|
\le |f_x| |\Delta x|+|f_y| |\Delta y|+ |f_z| |\Delta z|,") jossa viimeinen muoto koskee tapausta . Tässä merkintä
jossa viimeinen muoto koskee tapausta . Tässä merkintä  viittaa siihen, että epäyhtälö
viittaa siihen, että epäyhtälö  ei tarkasti ottaen ole voimassa, koska virhetermi on jätetty pois.
ei tarkasti ottaen ole voimassa, koska virhetermi on jätetty pois.
Huomautuksia
Toisin kuin yksiulotteisessa tapauksessa pelkkä osittaisderivaattojen olemassaolo ei riitä takaamaan edes funktion jatkuvuutta.
Esimerkiksi funktiolle
=\left\{\begin{array}{rl}
0, & \text{kun }x=0\text{ tai }y=0,\\
1, &\text{muuten}.
\end{array}\right.") on
on =f_x(0,0)=0") , mutta funktio on epäjatkuva pisteessä
, mutta funktio on epäjatkuva pisteessä ") .
Toinen samanlainen esimerkki on funktio
.
Toinen samanlainen esimerkki on funktio
=\left\{\begin{array}{rl}
\frac{2xy}{x^2 +y^2}, & \text{kun }x^2+y^2>0,\\
0, &\text{kun } (x,y)=(0,0).
\end{array}\right.") Siksi tilannetta on tarpeen analysoida tarkemmin. Halutaan ehto,
joka kertoo milloin lineaarinen approksimaatio on mielekäs funktiolle lähellä pistettä .
Siksi tilannetta on tarpeen analysoida tarkemmin. Halutaan ehto,
joka kertoo milloin lineaarinen approksimaatio on mielekäs funktiolle lähellä pistettä .
Differentioituvuus
Määritelmä. Funktio on differentioituva pisteessä , jos
\to (0,0)} \frac{f(a+h,b+k)-f(a,b)-h\,f_{x}(a,b)-k\,f_{y}(a,b)}{\sqrt{h^2+k^2}}=0.")
Differentiaalikaavan avulla (virhetermi mukana!) voidaan todistaa seuraava tulos:
Lause. Jos  ovat jatkuvia jossakin pisteen ympäristössä, niin on differentioituva pisteessä .
ovat jatkuvia jossakin pisteen ympäristössä, niin on differentioituva pisteessä .
Esimerkki
Lasketaan virhetermi -f(x,y)-h\,f_{x}(x,y)-k\,f_{y}(x,y)") , kun
, kun =x^3+xy^2") .
.
Osittaisderivaatoiksi saadaan =3x^2+y^2") ja
ja =2xy") , joten
\begin{align*}
&f(x+h,y+k)-f(x,y)-h\,f_{x}(x,y)-k\,f_{y}(x,y) \\
&\quad =(x+h)^3+(x+h)(y+k)^2-x^3-xy^2-(3x^2+y^2)h -2xyk\\
&\quad=3xh^2+h^3+2yhk+hk^2+xk^2. \\
\end{align*}
Lausekeen - ja
, joten
\begin{align*}
&f(x+h,y+k)-f(x,y)-h\,f_{x}(x,y)-k\,f_{y}(x,y) \\
&\quad =(x+h)^3+(x+h)(y+k)^2-x^3-xy^2-(3x^2+y^2)h -2xyk\\
&\quad=3xh^2+h^3+2yhk+hk^2+xk^2. \\
\end{align*}
Lausekeen - ja  -termit lähestyvät nollaa vähintään samalla nopeudella kuin
-termit lähestyvät nollaa vähintään samalla nopeudella kuin  , kun
, kun \to 0") , joten differentioituvuuden
määritelmä selvästi toteutuu.
, joten differentioituvuuden
määritelmä selvästi toteutuu.
2.5. Ketjusäännöt ja lineaarinen approksimointi
Motivaatio
Yleistetään derivoinnin ketjusääntö
\big) = f'\big(g(x)\big)g'(x)") usean muuttujan funktioille .
usean muuttujan funktioille .
Ketjusääntö liittyy suoraan myös moniin käytännön sovelluksiin. Voidaan ajatella fysikaalista suuretta kuten lämpötilaa tai mekaanisen systeemin kokonaisenergiaa, jotka riippuvat useista eri toissijaisista muuttujista (kuten ajasta, paikasta tai nopeudesta). Nämä muuttujat voivat riippua edelleen kolmansista muuttujista (paikka ja nopeus esimerkiksi ajasta). Halutaan tarkastella kiinnostavan fysikaalisen suureen muutosnopeutta mainittujen kolmansien muuttujien suhteen.
Esimerkki
Retkeilijä liikkuu karttaa käyttäen mäkisessä maastossa. Olkoon retkeilijän paikka kartalla, kulloinenkin korkeus meren pinnasta ja
=\left(u(t),v(t)\right)") retkeilijän paikka kartalla hetkellä .
Retkeilijän paikan korkeus eli etäisyys meren pinnan tasosta hetkellä on siis yhdistetty funktio
retkeilijän paikka kartalla hetkellä .
Retkeilijän paikan korkeus eli etäisyys meren pinnan tasosta hetkellä on siis yhdistetty funktio
,v(t)\right) = g(t).") Kuinka nopeasti retkelijän paikan korkeus muuttuu ajan kuluessa?
Kuinka nopeasti retkelijän paikan korkeus muuttuu ajan kuluessa?
Ilmeisestikin vastaus kysymykseen on funktion ") derivaatta. Lasketaan:
\begin{align*}
\lim_{h\to 0}\frac{g(t+h)-g(t)}{h}
&= \lim_{h\to 0}\frac{f(u(t+h),v(t+h))-f(u(t),v(t))}{h} \\
&= \lim_{h\to 0}\frac{f(u(t+h),v(t+h))-f(u(t),v(t+h))}{h}\\
&\quad + \lim_{h\to 0}\frac{f(u(t),v(t+h))-f(u(t),v(t))}{h}
\end{align*}
Yhden muuttujan ketjusäännön perusteella
derivaatta. Lasketaan:
\begin{align*}
\lim_{h\to 0}\frac{g(t+h)-g(t)}{h}
&= \lim_{h\to 0}\frac{f(u(t+h),v(t+h))-f(u(t),v(t))}{h} \\
&= \lim_{h\to 0}\frac{f(u(t+h),v(t+h))-f(u(t),v(t+h))}{h}\\
&\quad + \lim_{h\to 0}\frac{f(u(t),v(t+h))-f(u(t),v(t))}{h}
\end{align*}
Yhden muuttujan ketjusäännön perusteella
=f_{x}\big(u(t),v(t)\big)u'(t)+f_{y}\big(u(t),v(t)\big)v'(t).")
Ketjusäännöt
Olkoon muuttujien  jatkuvasti derivoituva funktio (eli funktio, jolla on jatkuvat 1. kertaluvun osittaisderivaatat).
Jos ovat muuttujan jatkuvasti derivoituvia funktioita, niin
jatkuvasti derivoituva funktio (eli funktio, jolla on jatkuvat 1. kertaluvun osittaisderivaatat).
Jos ovat muuttujan jatkuvasti derivoituvia funktioita, niin
 Jos ovat kahden muuttujan
Jos ovat kahden muuttujan  jatkuvasti derivoituvia funktioita, niin
\begin{equation}
\frac{\partial z}{\partial s} = \frac{\partial z}{\partial x}\frac{\partial x}{\partial s}
+ \frac{\partial z}{\partial y}\frac{\partial y}{\partial s}
\end{equation}
ja
\begin{equation}
\frac{\partial z}{\partial t} = \frac{\partial z}{\partial x}\frac{\partial x}{\partial t}
+ \frac{\partial z}{\partial y}\frac{\partial y}{\partial t}.
\end{equation}
jatkuvasti derivoituvia funktioita, niin
\begin{equation}
\frac{\partial z}{\partial s} = \frac{\partial z}{\partial x}\frac{\partial x}{\partial s}
+ \frac{\partial z}{\partial y}\frac{\partial y}{\partial s}
\end{equation}
ja
\begin{equation}
\frac{\partial z}{\partial t} = \frac{\partial z}{\partial x}\frac{\partial x}{\partial t}
+ \frac{\partial z}{\partial y}\frac{\partial y}{\partial t}.
\end{equation}
Ketjusäännöt voidaan todistaa soveltamalla tutkittavaan erotusosamäärään lineaarisen approksimaation kaavoja virhetermeineen.
Huom. Derivaatan ketjusääntö voidaan kirjoittaa myös gradientin avulla: Jos ,y(t))") , niin
, niin
) = \frac{\partial f}{\partial x}\frac{dx}{dt}+\frac{\partial f}{\partial y}\frac{dy}{dt}=
\nabla f(\mathbf{r}(t))\cdot \mathbf{r}'(t).")
Keskeisiä kysymyksiä:
Mikä on yleinen idea näissä kaavoissa?
Kuinka voidaan muodostaa yleisessä tapauksessa laskentakaava yhdistetyn funktion (osittais)derivaatoille?
Ajatellaanpa, että ") , jossa
, jossa ") ja
ja ") . Tarkastellaan graafina "infinitesimaalisen muutoksen etenemistä"
muuttujasta muuttujaan kaikkien etenemisreittien kautta.
. Tarkastellaan graafina "infinitesimaalisen muutoksen etenemistä"
muuttujasta muuttujaan kaikkien etenemisreittien kautta.
Kuinka tilanne muuttuu, jos lisäksi ") ja
ja ,") jolloin
jolloin ") ja kysytään kaavaa derivaatalle
ja kysytään kaavaa derivaatalle  ?
Saadaan
?
Saadaan
 ja
\begin{align*}
\frac{d z}{d t} & = \frac{\partial f}{\partial u} \left ( \frac{\partial u}{\partial x} \frac{d x}{d t} + \frac{\partial u}{\partial y} \frac{d y}{d t} \right ) \\
&\quad+ \frac{\partial f}{\partial v} \left ( \frac{\partial v }{\partial t} + \frac{\partial v}{\partial y} \frac{d y}{d t} \right ) + \frac{\partial f}{\partial t},
\end{align*}
jossa on yhteensä viisi termiä.
ja
\begin{align*}
\frac{d z}{d t} & = \frac{\partial f}{\partial u} \left ( \frac{\partial u}{\partial x} \frac{d x}{d t} + \frac{\partial u}{\partial y} \frac{d y}{d t} \right ) \\
&\quad+ \frac{\partial f}{\partial v} \left ( \frac{\partial v }{\partial t} + \frac{\partial v}{\partial y} \frac{d y}{d t} \right ) + \frac{\partial f}{\partial t},
\end{align*}
jossa on yhteensä viisi termiä.
 että
että  ,
jotka tarkoittavat eri asiaa!
,
jotka tarkoittavat eri asiaa!
Esimerkki
Olkoon  jatkuvasti derivoituva. Etsitään
jatkuvasti derivoituva. Etsitään
\text{ ja }
\frac{\partial}{\partial y} f(x^2y,x+2y).")
Saadaan \begin{align*} \frac{\partial}{\partial x} f(x^2y,x+2y) &= f_{x}(x^2y,x+2y)\frac{\partial}{\partial x} (x^2y) \\ &\quad +f_{y}(x^2y,x+2y)\frac{\partial}{\partial x}(x+2y) \\ &= 2xy f_{x}(x^2y,x+2y)+ f_{y}(x^2y,x+2y). \end{align*} Vastaavasti voidaan laskea \begin{align*} \frac{\partial}{\partial y} f(x^2y,x+2y) &= f_{x}(x^2y,x+2y)\frac{\partial}{\partial y} (x^2y) \\ & +f_{y}(x^2y,x+2y)\frac{\partial}{\partial y}(x+2y) \\ &= x^2 f_{x}(x^2y,x+2y)+ 2f_{y}(x^2y,x+2y). \end{align*}
Esimerkki
Lämpötila ilmakehässä C) riippuu paikasta sekä ajasta . Ajatellaan lämpötilaa näistä parametrista riippuvana funktiona
C) riippuu paikasta sekä ajasta . Ajatellaan lämpötilaa näistä parametrista riippuvana funktiona ") .
Jos funktio
.
Jos funktio  esittää sääpalloon liitetyn lämpömittarin mittaamaa lämpötilaa, määritetään :n muutos ajan suhteen.
esittää sääpalloon liitetyn lämpömittarin mittaamaa lämpötilaa, määritetään :n muutos ajan suhteen.
Määritetään lämpötilan muutos hetkellä  , kun
, kun
=\frac{xy}{1+z}(1+t),") ja sääpallo etenee reittiä
ja sääpallo etenee reittiä =(t,2t,t-t^2)") .
Koska lämpömittarin lukeman muutos riippuu kaikista neljästä parametrista, mitään niistä ei voida jättää huomiotta.
.
Koska lämpömittarin lukeman muutos riippuu kaikista neljästä parametrista, mitään niistä ei voida jättää huomiotta.
Lämpötilan muutoksen kaavaksi saadaan siten
 Koordinaattifunktioiden arvot hetkellä ovat
Koordinaattifunktioiden arvot hetkellä ovat
 Koordinaattifunktioiden derivaattojen arvot hetkellä ovat
Koordinaattifunktioiden derivaattojen arvot hetkellä ovat
 Siten hetkellä saadaan
\begin{align*}
\frac{\partial T}{\partial x} &= \frac{y}{1+z}(1+t)=4,
&&\frac{\partial T}{\partial y} = \frac{x}{1+z}(1+t)=2, \\
\frac{\partial T}{\partial z} &= \frac{-xy}{(1+z)^2}(1+t)=-4,
&&\frac{\partial T}{\partial t} = \frac{xy}{1+z}=2.
\end{align*}
Näin ollen,
Siten hetkellä saadaan
\begin{align*}
\frac{\partial T}{\partial x} &= \frac{y}{1+z}(1+t)=4,
&&\frac{\partial T}{\partial y} = \frac{x}{1+z}(1+t)=2, \\
\frac{\partial T}{\partial z} &= \frac{-xy}{(1+z)^2}(1+t)=-4,
&&\frac{\partial T}{\partial t} = \frac{xy}{1+z}=2.
\end{align*}
Näin ollen,
 \cdot (-1) +2 = 14.")
3. Taylorin polynomi ja sarja
Taylorin kaava
Yhden muuttujan tapauksessa  kertaa jatkuvasti derivoituvaa funktiota
kertaa jatkuvasti derivoituvaa funktiota  voidaan approksimoida kaavalla
voidaan approksimoida kaavalla
\approx f(a)+f'(a)(x-a)+ \frac{f''(a)}{2!}(x-a)^2+ \ldots + \frac{f^{(m)}(a)}{m!}(x-a)^m.") kun
kun  .
.
Tämä idea yleistyy usean muuttujan tapaukseen: Jos  , ja funktiolla on
jatkuvat kertaluvun
, ja funktiolla on
jatkuvat kertaluvun ") osittaisderivaatat pisteitä
osittaisderivaatat pisteitä
 yhdistävällä janalla, niin
yhdistävällä janalla, niin
 \approx \sum_{j=0}^m\frac{(\mathbf{h} \cdot \nabla)^jf(\mathbf{a})}{j!}.")
Perustelu. Yksinkertaisuuden vuoksi johdetaan tässä kaava tapauksessa riittävän sileille funktioille.
Olkoon  avoin ja funktio
avoin ja funktio
 äärettömän monta kertaa jatkuvasti derivoituva.
Lisäksi oletetaan, että
äärettömän monta kertaa jatkuvasti derivoituva.
Lisäksi oletetaan, että  , kun
, kun  . Tällöin oleellisesti myös apufunktion
. Tällöin oleellisesti myös apufunktion
=f(\mathbf{a}+t\mathbf{h})") kaikki derivaatat ovat jatkuvia suljetulla välillä
kaikki derivaatat ovat jatkuvia suljetulla välillä ![\left[0,1\right]](https://mycourses.aalto.fi/filter/tex/pix.php/4f27db35c23e1b587a92f6ba055a4b94.gif "\left[0,1\right]") .
.
Ketjusäännön nojalla saadaan apufunktiota derivoimalla
 = h_{1}f_{x}(\mathbf{a}+t\mathbf{h}) + h_{2}f_{y}(\mathbf{a}+t\mathbf{h}) = (\mathbf{h}\cdot\nabla)f(\mathbf{a}+t\mathbf{h})")
 = h_{1}h_{2}f_{xx}(\mathbf{a}+t\mathbf{h}) + h_{1}h_{2}f_{xy}(\mathbf{a}+t\mathbf{h}) + h_{2}h_{1}f_{xy}(\mathbf{a}+t\mathbf{h})
+ h_{2}h_{2}f_{yy}(\mathbf{a}+t\mathbf{h}) = (\mathbf{h}\cdot\nabla)^{2}f(\mathbf{a}+t\mathbf{h})")

}(t) = (\mathbf{h}\cdot\nabla)^{j}f(\mathbf{a}+t\mathbf{h}).") Tästä havaitaan, että
Tästä havaitaan, että }(0) = (\mathbf{h}\cdot\nabla)^{j}f(\mathbf{a})") ja siten yhden muuttujan funktion Taylorin sarjakehitelmä on
muotoa
ja siten yhden muuttujan funktion Taylorin sarjakehitelmä on
muotoa
 = F(0) + F'(0)t + \frac{1}{2}F''(0)t^{2}+\dots = \sum_{j=0}^{\infty}\frac{F^{(j)}(0)}{j!}t^{j}.") Asettamalla tässä saadaan haluttu tulos,
Asettamalla tässä saadaan haluttu tulos,
 = f(\mathbf{a})+\mathbf{h}\cdot\nabla f(\mathbf{a}) + \frac{1}{2}(\mathbf{h}\cdot\nabla)^{2}f(\mathbf{a})+\dots")
^{j}}{j!}f(\mathbf{a}).")
Esimerkki
Olkoon \in \mathbb{R}^2") ja neljä kertaa jatkuvasti derivoituva kiekossa -keskisessä -säteisessä kiekossa.
Etsitään 3. asteen approksimaatio. Jos
ja neljä kertaa jatkuvasti derivoituva kiekossa -keskisessä -säteisessä kiekossa.
Etsitään 3. asteen approksimaatio. Jos ") , niin
\begin{align*}
f(a+h,b+k)&\approx
f(a,b) + (hD_1+kD_2)f(a,b) +\frac{1}{2!}(hD_1+kD_2)^2f(a,b) \\
&\quad +\frac{1}{3!}(hD_1+kD_2)^3f(a,b) \\
&= f(a,b) + hf_{x}(a,b)+kf_{y}(a,b) \\
&\quad+ \frac{1}{2!}\Big(h^2f_{xx}(a,b)+2hkf_{xy}(a,b)+k^2f_{yy}(a,b)\Big) \\
&\quad+\frac{1}{3!}\Big(h^3f_{xxx}(a,b)+ 3h^2kf_{xxy}(a,b)+3hk^2f_{xyy}(a,b)+k^3f_{yyy}(a,b)\Big).
\end{align*}
, niin
\begin{align*}
f(a+h,b+k)&\approx
f(a,b) + (hD_1+kD_2)f(a,b) +\frac{1}{2!}(hD_1+kD_2)^2f(a,b) \\
&\quad +\frac{1}{3!}(hD_1+kD_2)^3f(a,b) \\
&= f(a,b) + hf_{x}(a,b)+kf_{y}(a,b) \\
&\quad+ \frac{1}{2!}\Big(h^2f_{xx}(a,b)+2hkf_{xy}(a,b)+k^2f_{yy}(a,b)\Big) \\
&\quad+\frac{1}{3!}\Big(h^3f_{xxx}(a,b)+ 3h^2kf_{xxy}(a,b)+3hk^2f_{xyy}(a,b)+k^3f_{yyy}(a,b)\Big).
\end{align*}
Huom. 1. asteen Taylor-approksimaatio on sama kuin tangenttitaso.
Esimerkki
Etsitään 2. asteen Taylor-approksimaatio funktiolle =\sqrt{x^2+y^3}") pisteen
pisteen ") ympäristössä.
ympäristössä.
Lasketaan =3") ,
,
=\frac{x}{\sqrt{x^2+y^3}},\quad
f_{y}(x,y)=\frac{3y^2}{2\sqrt{x^2+y^3}},") eli
eli =1/3") ja
ja =2") .
Edelleen
.
Edelleen
=\frac{y^3}{(x^2+y^3)^{3/2}} \quad\Rightarrow\quad f_{xx}(1,2)= \frac{8}{27},")
=\frac{-3xy^2}{2(x^2+y^3)^{3/2}} \quad\Rightarrow\quad f_{xy}(1,2)= -\frac{2}{9},")
=\frac{12x^2y+3y^4}{4(x^2+y^3)^{3/2}} \quad\Rightarrow\quad f_{yy}(1,2)= \frac{2}{3}.") Siten
\begin{align*}
f(1+h,2+k) &\approx 3 + \frac{1}{3}h + 2k +
\frac{1}{2!}\Big(\frac{8}{27}h^2+2\Big(-\frac{2}{9}\Big)hk+\frac{2}{3}k^2\Big) \\
&= \frac{4}{27}h^2-\frac{2}{9}hk+\frac{1}{3}k^2+\frac{1}{3}h + 2k + 3.
\end{align*}
Siten
\begin{align*}
f(1+h,2+k) &\approx 3 + \frac{1}{3}h + 2k +
\frac{1}{2!}\Big(\frac{8}{27}h^2+2\Big(-\frac{2}{9}\Big)hk+\frac{2}{3}k^2\Big) \\
&= \frac{4}{27}h^2-\frac{2}{9}hk+\frac{1}{3}k^2+\frac{1}{3}h + 2k + 3.
\end{align*}
4. Ääriarvot
Kertausta: ääriarvot yhden muuttujan tapauksessa
Funktiolla on lokaali (paikallinen) maksimi pisteessä
on lokaali (paikallinen) maksimi pisteessä  , jos
, jos \le f(a)") kaikilla
kaikilla  :n arvoilla jossakin :n ympäristössä (eli riittävän lähellä pistettä ). Vastaavasti lokaali minimi tarkoittaa sitä, että
:n arvoilla jossakin :n ympäristössä (eli riittävän lähellä pistettä ). Vastaavasti lokaali minimi tarkoittaa sitä, että \ge f(a)") jossakin :n ympäristössä. Maksimi tai minimi on globaali, jos kyseinen epäyhtälö on voimassa kaikilla
jossakin :n ympäristössä. Maksimi tai minimi on globaali, jos kyseinen epäyhtälö on voimassa kaikilla  .
. Ääriarvoja voi esiintyä:
- Funktion kriittisissä pisteissä, joissa
=0") ,
, - pisteissä joissa :n derivaatta ei ole määritelty, ja
- määrittelyjoukon reunalla.
Seuraavaksi yleistetään vastaavat ehdot funktion tapaukseen.
Ääriarvot ja usean muuttujan funktiot
Funktiolla on pisteessä lokaali maksimi, jos jossakin pisteen  ympäristössä
ympäristössä  pätee
pätee \le f(\mathbf{x}_0)") kaikilla
kaikilla  . Vastaavasti on pisteessä lokaali minimi, jos löytyy sellainen pisteen ympäristö , että
. Vastaavasti on pisteessä lokaali minimi, jos löytyy sellainen pisteen ympäristö , että \ge f(\mathbf{x}_0)") kaikilla . Ääriarvo on globaali eli absoluuttinen, jos kyseinen epäyhtälö on voimassa kaikilla .
kaikilla . Ääriarvo on globaali eli absoluuttinen, jos kyseinen epäyhtälö on voimassa kaikilla . Ääriarvoja voi esiintyä:
- Funktion kriittissä pisteissä eli gradientin nollakohdissa
=0") ,
, - pisteissä joissa ei ole määritelty, sekä
- määrittelyjoukon
 reunalla.
reunalla.
kriittistä pistettä , joka ei ole maksimi tai minimi, kutsutaan funktion satulapisteeksi.
Esimerkki
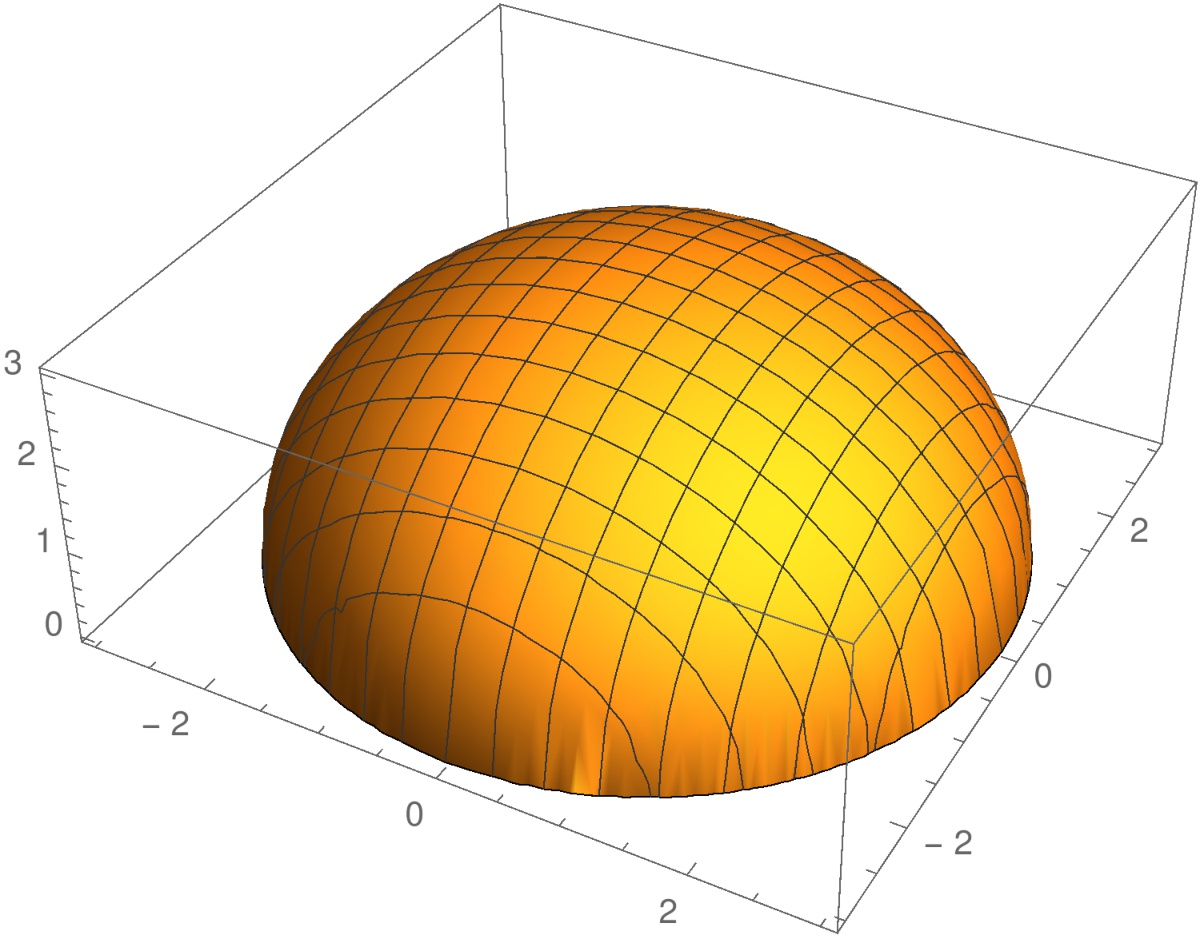
Funktiolla = 1-x^2-y^2") on globaali maksimi
on globaali maksimi =1") pisteessä
pisteessä ") . Tämä piste on funktion kriittinen piste, koska
. Tämä piste on funktion kriittinen piste, koska  = -2x\mathbf{i} -2y\mathbf{j} \Big|_{(0,0)}= \mathbf{0}.")
Esimerkki
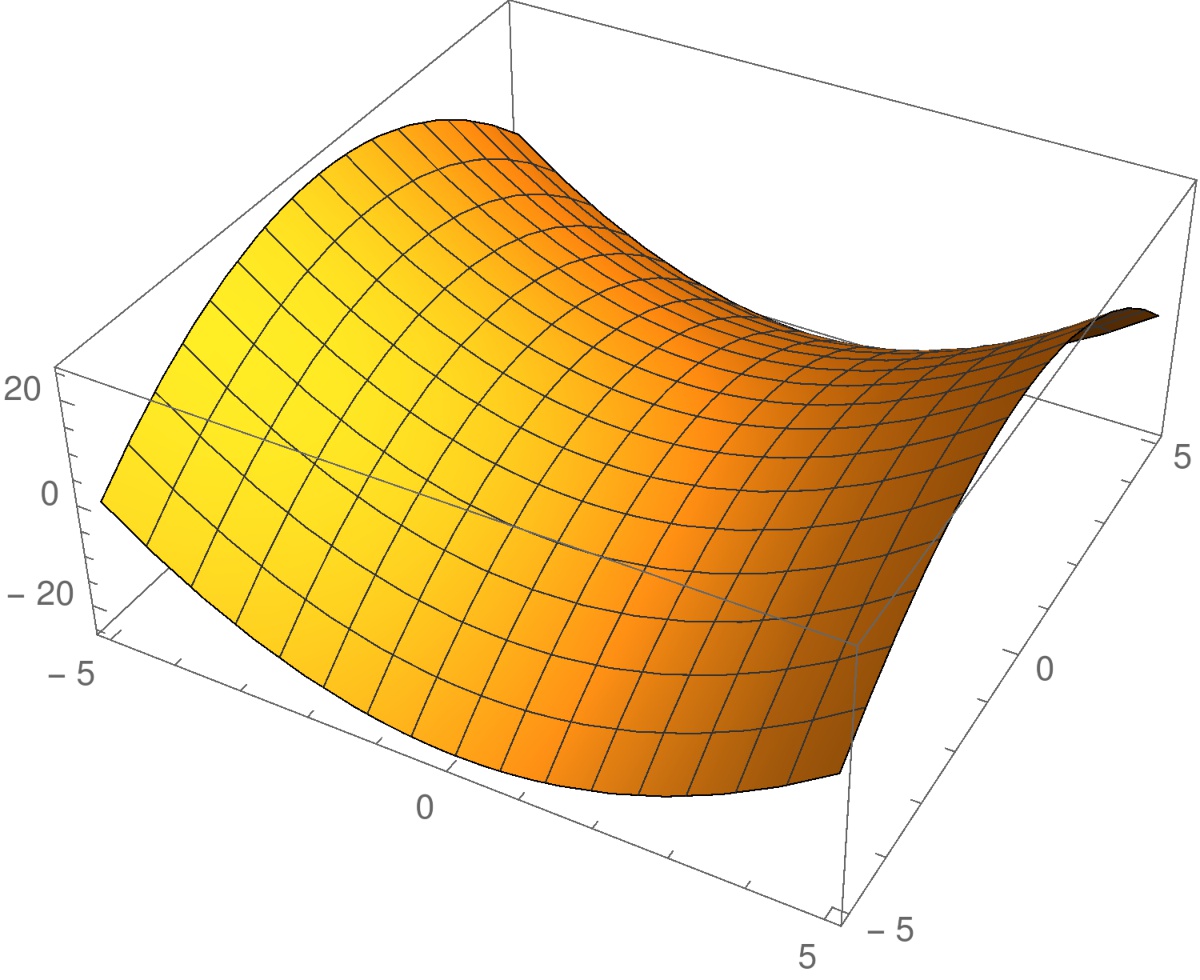
= y^2-x^2") on satulapiste . Tämä piste on funktion kriittinen piste, koska
on satulapiste . Tämä piste on funktion kriittinen piste, koska  = -2x\mathbf{i}+2y\mathbf{j}\Big|_{(0,0)}= \mathbf{0}.")
Esimerkki
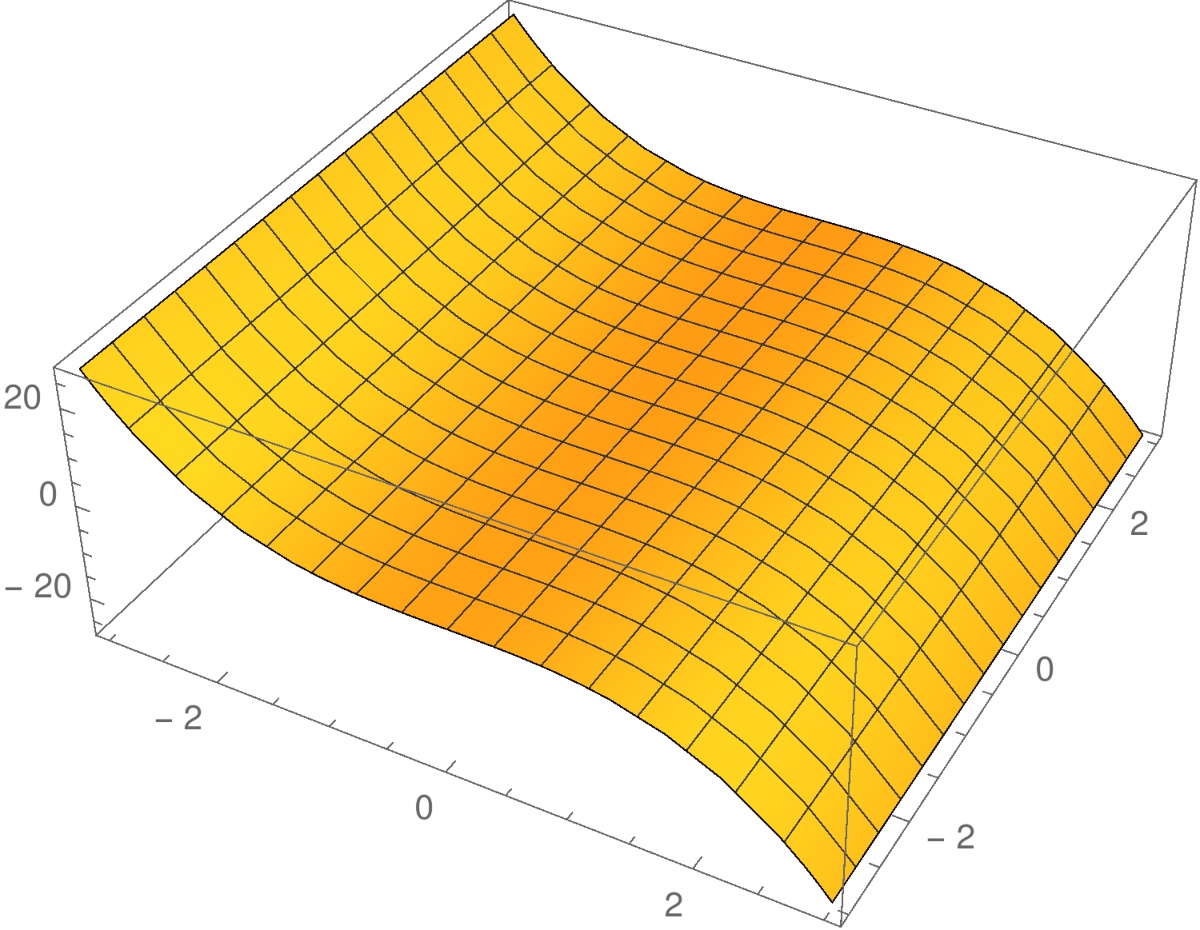
 ovat funktion
ovat funktion = -x^3") satulapisteitä. Huomaa, että
satulapisteitä. Huomaa, että  = -3x^2\mathbf{i} \Big|_{(0,y)}= \mathbf{0} \text{ kaikilla }y\in \mathbb{R}.")
Esimerkki
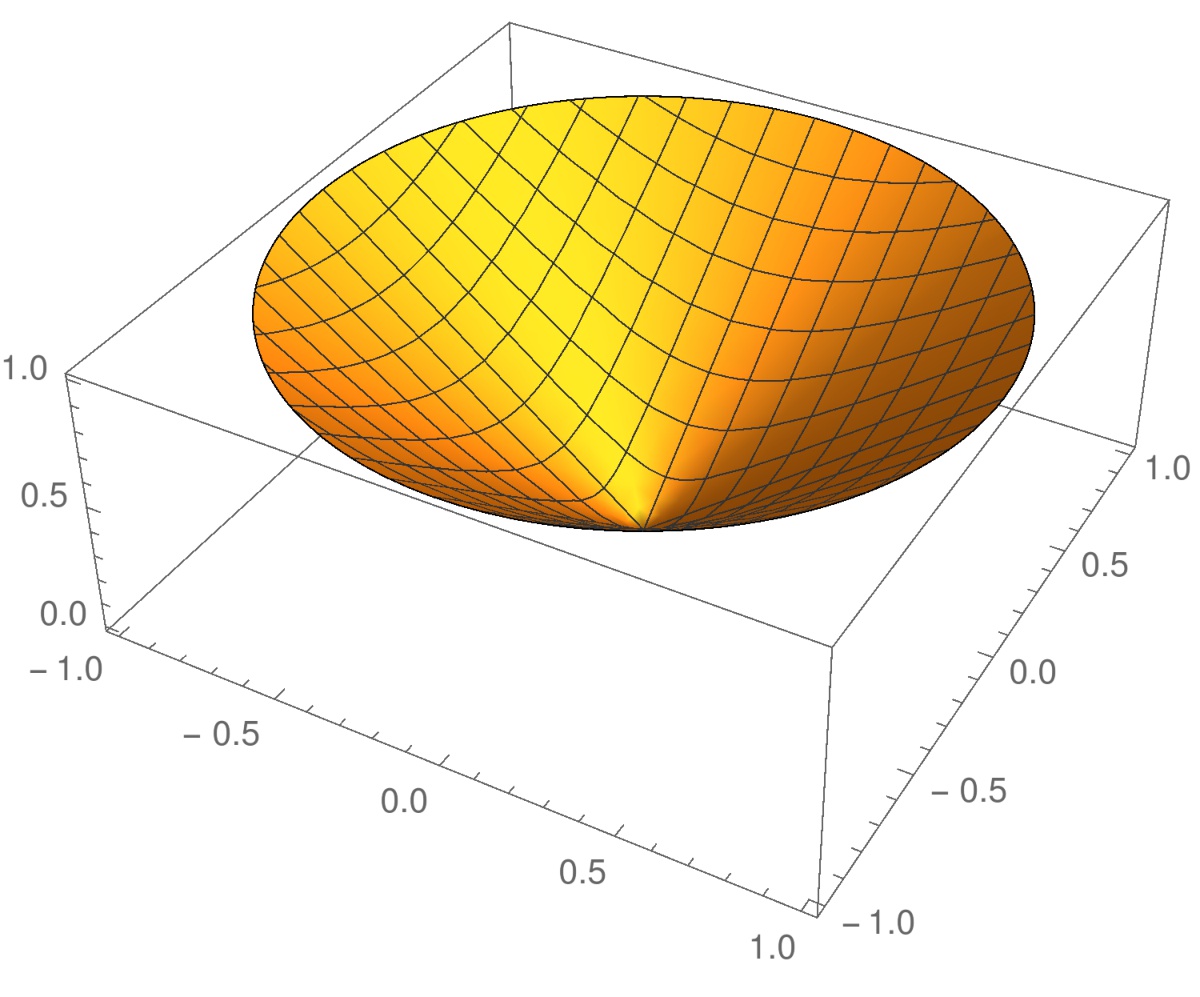
= \sqrt{x^2+y^2}") on lokaali minimi
on lokaali minimi =0") pisteessä . Funktio on jatkuva, mutta sen gradientti ei ole määritelty tässä pisteessä.
pisteessä . Funktio on jatkuva, mutta sen gradientti ei ole määritelty tässä pisteessä.
Esimerkki
=1-x") ei ole paikallisia ääriarvoja, jos sen määrittelyjoukko on koko taso
ei ole paikallisia ääriarvoja, jos sen määrittelyjoukko on koko taso  . Jos määrittelyjoukoksi kuitenkin ajatellaan esimerkiksi kiekko
. Jos määrittelyjoukoksi kuitenkin ajatellaan esimerkiksi kiekko : x^2+y^2 \leq 1\}") , niin sen reunalla saadaan maksimi
, niin sen reunalla saadaan maksimi =2") ja minimi
ja minimi =0") .
.
4.1. Kriittisten pisteiden luokittelu
Johdanto
Ääriarvojen luokittelu perustuu suureen  -f(\mathbf{x})") tarkasteluun kriittisessä pisteessä . Jos
tarkasteluun kriittisessä pisteessä . Jos  saa vain positiivisia arvoja (kun
saa vain positiivisia arvoja (kun  on pieni), on piste minimi ja negatiivisessa tapauksessa maksimi. Jos vaihtaa merkkiä, niin piste ei ole minimi eikä maksimi. Tämä johtaa funktion toisen derivaatan tarkasteluun kriittisessä pisteessä.
on pieni), on piste minimi ja negatiivisessa tapauksessa maksimi. Jos vaihtaa merkkiä, niin piste ei ole minimi eikä maksimi. Tämä johtaa funktion toisen derivaatan tarkasteluun kriittisessä pisteessä.
Yhden muuttujan tapauksessa:
- Jos
< 0") , niin funktiolla lokaali maksimi pisteessä .
, niin funktiolla lokaali maksimi pisteessä . - Jos
>0") , niin funktiolla lokaali minimi pisteessä .
, niin funktiolla lokaali minimi pisteessä . - Jos
=0") , niin testi ei anna vastausta, ja kysymys täytyy ratkaista muulla tavoin.
, niin testi ei anna vastausta, ja kysymys täytyy ratkaista muulla tavoin.
Hessen matriisi
Olkoon funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat. Funktion luonnollinen derivaattakäsite on gradientti, joka itsessään on vektoriarvoinen funktio
funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat. Funktion luonnollinen derivaattakäsite on gradientti, joka itsessään on vektoriarvoinen funktio  . Siten funktion toinen derivaatta on matriisi, jota nimitetään Hessen matriisiksi
. Siten funktion toinen derivaatta on matriisi, jota nimitetään Hessen matriisiksi = \begin{bmatrix} \frac{\partial^2}{\partial x_1^2} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2\partial x_1} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n\partial x_1} f(\mathbf{x})\\ \frac{\partial^2}{\partial x_1\partial x_2} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2^2} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n\partial x_2} f(\mathbf{x})\\ \vdots & \vdots & & \vdots \\ \frac{\partial^2}{\partial x_1\partial x_n} f(\mathbf{x}) & \frac{\partial^2}{\partial x_2\partial x_n} f(\mathbf{x}) & \cdots & \frac{\partial^2}{\partial x_n^2} f(\mathbf{x}) \\ \end{bmatrix}.") Koska on kaksi kertaa jatkuvasti derivoituva, derivoinnin järjestystä voidaan vaihtaa, ja kyseinen matriisi on symmetrinen.
Koska on kaksi kertaa jatkuvasti derivoituva, derivoinnin järjestystä voidaan vaihtaa, ja kyseinen matriisi on symmetrinen.
Miksi Hessen matriisi kiinnostaa meitä? Kun gradientin avulla voidaan kirjoittaa lineaarinen (ensimmäisen asteen) approksimaatio funktiolle , niin Hessen matriisilla saadaan kvadraattinen tarkennus:  \approx f(\mathbf{x}) + \mathbf{h} \cdot \nabla f (\mathbf{x}) + \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T,") jossa (vaaka)vektori
jossa (vaaka)vektori ") on pieni.
on pieni.
Tämä kaava on itse asiassa ainoastaan uusi tapa kirjoittaa toisen kertaluvun Taylorin approksimaatio :n muuttujan funktiolle. Muotoa  oleva lauseke on
oleva lauseke on  -neliömatriisille niin kutsuttu neliömuoto, jossa
-neliömatriisille niin kutsuttu neliömuoto, jossa  on -pystyvektori.
on -pystyvektori.
Kirjoita kaava auki tapauksessa  !
!
Pisteessä, jossa  = 0") , on voimassa approksimaatio
, on voimassa approksimaatio  - f(\mathbf{x}) \approx \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T.") Tätä voidaan käyttää hyväksi mahdollisen ääriarvon luokittelussa pisteessä ajattelemalla, että
Tätä voidaan käyttää hyväksi mahdollisen ääriarvon luokittelussa pisteessä ajattelemalla, että  .
.
Matriisin (ja neliömuodon) definiittisyys
Symmetristä -matriisia sanotaan positiividefiniitiksi, jos sen kaikki ominaisarvot ovat positiivisia ja negatiividefiniitiksi, jos  on positiividefiniitti. Matriisin sanotaan olevan indefiniitti, jos sen kaikki ominaisarvot ovat nollasta poikkeavia ja sillä on vähintään yksi positiivinen sekä yksi negatiivinen ominaisarvo. Positiivi/negatiividefiniiteillä matriiseilla on monia samoja ominaisuuksia kuin positiivisilla/negatiivisilla reaaliluvuilla.
on positiividefiniitti. Matriisin sanotaan olevan indefiniitti, jos sen kaikki ominaisarvot ovat nollasta poikkeavia ja sillä on vähintään yksi positiivinen sekä yksi negatiivinen ominaisarvo. Positiivi/negatiividefiniiteillä matriiseilla on monia samoja ominaisuuksia kuin positiivisilla/negatiivisilla reaaliluvuilla.
Symmetrisen matriisin definiittiys tai indefiniittiys periytyy sitä vastaavalle neliömuodolle.
on positiividefiniitti 
 kaikilla nollasta poikkeavilla pystyvektoreilla .
kaikilla nollasta poikkeavilla pystyvektoreilla .
on negatiividefiniitti  kaikilla nollasta poikkeavilla pystyvektoreilla .
kaikilla nollasta poikkeavilla pystyvektoreilla .
on indefiniitti  saavuttaa sekä negatiivisia että positiivisia arvoja pystyvektorin vaihdellessa.
saavuttaa sekä negatiivisia että positiivisia arvoja pystyvektorin vaihdellessa.
muotoon  , jossa diagonaalimatriisi
, jossa diagonaalimatriisi  sisältää :n ominaisarvot.
sisältää :n ominaisarvot.
Toisen derivaatan testi monen muuttajan tapauksessa
Lause. Olkoon funktio, jolla on jatkuvat toisen kertaluvun osittaisderivaatat kriittisen pisteen ympäristössä. Tällöin:
- Jos
") on positiividefiniitti, niin :llä on lokaali minimi pisteessä .
on positiividefiniitti, niin :llä on lokaali minimi pisteessä . - Jos on negatiividefiniitti, niin :llä on lokaali maksimi pisteessä .
- Jos on indefiniitti, niin on funktion satulapiste.
- Muussa tapauksessa testi ei anna tietoa funktiosta .
Lause seuraa approksimaatiosta  - f(\mathbf{x}) \approx \frac{1}{2} \mathbf{h} H_f(\mathbf{x}) \mathbf{h}^T") kun . Väite täytyy nimittäin ainoastaan tarkastaa Hessen matriisin määräämälle neliömuodolle.
kun . Väite täytyy nimittäin ainoastaan tarkastaa Hessen matriisin määräämälle neliömuodolle.
Esimerkki
Etsitään ja luokitellaan funktion  = x^2y+y^2z+z^2-2x") kriittiset pisteet.
kriittiset pisteet.
Yhtälöt kriittisille pisteille ovat \begin{align*} 0 &= f_{x}(x,y,z)=2xy-2,\\ 0 &= f_{y}(x,y,z)=x^2+2yz,\\ 0 &= f_{z}(x,y,z)=y^2+2z.\\ \end{align*} Nämä yhtälöt ratkaisemalla nähdään, että funktion ainoa kriittinen piste on ") .
.
Lasketaan Hessen matriisi ![H_f(1,1,-1/2)=\left [ \begin{smallmatrix} 2 & 2 & 0 \\ 2 & -1 & 2 \\ 0 & 2 & 2 \end{smallmatrix} \right ]](https://mycourses.aalto.fi/filter/tex/pix.php/67e1c90e30413fa189c4208b87d24fc9.gif "H_f(1,1,-1/2)=\left [ \begin{smallmatrix} 2 & 2 & 0 \\ 2 & -1 & 2 \\ 0 & 2 & 2 \end{smallmatrix} \right ]") ja lasketaan matriisin ominaisarvot vaikkapa MATLABilla
ja lasketaan matriisin ominaisarvot vaikkapa MATLABilla
>> a = [2 2 0 ; 2 -1 2 ; 0 2 2]
a =
2 2 0
2 -1 2
0 2 2
>> eig(a)
ans =
-2.7016
2.0000
3.7016
Koska ominaisarvoissa on erimerkkisiä lukuja, niin funktiolla on satulapiste pisteessä .
4.2. Maksimi ja minimi
Puuttuu vielä.4.3. Lagrangen kertoimet
Lagrangen kertoimet
Usein optimointitehtävissä halutaan asettaa rajoitusehtoja
optimoitaville muuttujille.
Tyypillinen esimerkki tällaisesta tehtävästä on peltipurkin muodon optimointi: Halutaan minimoida purkin pinta-ala (eli käytetty materiaali) =2\pi rh+2\pi r^2") niin, että tilavuus
niin, että tilavuus
=\pi r^2 h") on vakio.
on vakio.
Duaalitehtävä: Halutaan maksimoida purkin tilavuus ") siten, että pinta-ala
siten, että pinta-ala ") on vakio.
Primaali- ja duaalitehtävillä on sama ratkaisu. Tämän sanoo maalaisjärkikin, mutta itse asiassa ratkaisuun johtavat yhtälötkin ovat (olennaisesti) samoja.
on vakio.
Primaali- ja duaalitehtävillä on sama ratkaisu. Tämän sanoo maalaisjärkikin, mutta itse asiassa ratkaisuun johtavat yhtälötkin ovat (olennaisesti) samoja.
Havaitaan, että mikäli ongelmalla on ratkaisu, niin ratkaisupisteessä vektorien ja  on oltava joko yhdensuuntaisia tai vastakkaissuuntaisia (mikäli
on oltava joko yhdensuuntaisia tai vastakkaissuuntaisia (mikäli  \neq 0") ).
Miksi? Koska muussa tapauksessa funktiolla olisi nollasta poikkeva suunnattu derivaatta käyrän
).
Miksi? Koska muussa tapauksessa funktiolla olisi nollasta poikkeva suunnattu derivaatta käyrän =0") tangentin suuntaan pisteessä , ja siis minimi ei voi olla pisteessä .
tangentin suuntaan pisteessä , ja siis minimi ei voi olla pisteessä .
Entä jos tehtävänä olisi maksimoida ehdolla ?
Entä jos tehtävänä olisi maksimoida ") ehdolla
ehdolla =c") ?
?
Mikäli optimipiste on olemassa, se on Lagrangen funktion
 = f(x,y) + \lambda g(x,y)") kriittinen piste (eli gradientin nollakohta).
Menetelmä yleistyy myös useammalle muuttujalle. Esimerkiksi kolmen muuttujan tapauksessa Lagrangen funktio on
kriittinen piste (eli gradientin nollakohta).
Menetelmä yleistyy myös useammalle muuttujalle. Esimerkiksi kolmen muuttujan tapauksessa Lagrangen funktio on
 = f(x,y,z) + \lambda g(x,y,z) + \mu h(x,y,z),") missä on minimoitava funktio ja rajoite-ehdot ovat
missä on minimoitava funktio ja rajoite-ehdot ovat =0") sekä
sekä =0") .
.
Esimerkki
Minimoidaan funktio ehdolla =x^2y-16=0") .
Muodostetaan aluksi Lagrangen funktio
.
Muodostetaan aluksi Lagrangen funktio
=x^2+y^2+\lambda(x^2y-16).") Yhtälöt kriittisille pisteille ovat
\begin{align*}
0 &=\frac{\partial L}{\partial x} = 2x(1+\lambda y),\\
0 &=\frac{\partial L}{\partial y} = 2y+\lambda x^2,\\
0 &=\frac{\partial L}{\partial \lambda}= x^2y-16,\\
\end{align*}
joista viimeinen on aina itse rajoitusehto.
Yhtälöt kriittisille pisteille ovat
\begin{align*}
0 &=\frac{\partial L}{\partial x} = 2x(1+\lambda y),\\
0 &=\frac{\partial L}{\partial y} = 2y+\lambda x^2,\\
0 &=\frac{\partial L}{\partial \lambda}= x^2y-16,\\
\end{align*}
joista viimeinen on aina itse rajoitusehto.
Ensimmäisestä yhtälöstä saadaan tai  , mutta on ristiriidassa kolmannen yhtälön kanssa.
Siten toisesta yhtälöstä
, mutta on ristiriidassa kolmannen yhtälön kanssa.
Siten toisesta yhtälöstä
 Tästä saadaan edelleen
Tästä saadaan edelleen  , ja
, ja  eli
eli  .
Ääriarvoja (mahdollisia minimejä) on siis kaksi
.
Ääriarvoja (mahdollisia minimejä) on siis kaksi  = (\pm 2\sqrt{2},2)") .
Pitää selvittää muilla keinoin, ovatko nämä minimejä vai maksimeja.
.
Pitää selvittää muilla keinoin, ovatko nämä minimejä vai maksimeja.
Esimerkki
Yritetään etsiä Lagrangen kertoimien menetelmällä funktion =y") minimi ehdolla
minimi ehdolla =y^3-x^2=0") .
Helposti havaitaan, että minimi
.
Helposti havaitaan, että minimi =0") saavutetaan pisteessä .
saavutetaan pisteessä .
Muodostetaan Lagrangen funktio
=y+\lambda(y^3-x^2).") Saadaan yhtälöt
Saadaan yhtälöt
 Nämä yhtälöt ovat keskenään ristiriidassa, joten ratkaisua niille ei ole. Huomaa, että
Nämä yhtälöt ovat keskenään ristiriidassa, joten ratkaisua niille ei ole. Huomaa, että  =\mathbf{0}") minimipisteessä. Tästä nähdään, että
Lagrangen kertoimet näkevät ääriarvoja vain
pisteissä, joissa
minimipisteessä. Tästä nähdään, että
Lagrangen kertoimet näkevät ääriarvoja vain
pisteissä, joissa  \neq \mathbf{0}") .
.
Esimerkki
Etsitään ääriarvot funktiolle =xy+2z") ehdoilla
ehdoilla  ja
ja  .
.
Koska on jatkuva ja annettujen leikkausjoukkojen leikkaus on ympyräviiva (eli rajoitettu ja suljettu joukko), niin ääriarvot ovat olemassa.
Muodostetaan Lagrangen funktio
=xy+2z+\lambda(x+y+z)+\mu(x^2+y^2+z^2-24).") Lagrangen funktion osittaisderivaatoista saadaan yhtälöt
\begin{align*}
& y+\lambda+2\mu x=0, \\
& x+\lambda+2\mu y=0, \\
& 2+\lambda+2\mu z=0, \\
& x+y+z = 0,\text{ ja } \\
& x^2+y^2+z^2-24=0.
\end{align*}
Kahden ensimmäisen yhtälön erotus johtaa yhtälöön
Lagrangen funktion osittaisderivaatoista saadaan yhtälöt
\begin{align*}
& y+\lambda+2\mu x=0, \\
& x+\lambda+2\mu y=0, \\
& 2+\lambda+2\mu z=0, \\
& x+y+z = 0,\text{ ja } \\
& x^2+y^2+z^2-24=0.
\end{align*}
Kahden ensimmäisen yhtälön erotus johtaa yhtälöön (1-2\mu)=0") , joten joko
, joten joko  tai
tai  . Tutkitaan molemmat tapaukset.
. Tutkitaan molemmat tapaukset.
Tapaus I (): Toisen ja kolmannen yhtälön perusteella
 Neljännestä yhtälöstä saadaan
Neljännestä yhtälöstä saadaan  ja
ja  . Viimeisen yhtälön perusteella
. Viimeisen yhtälön perusteella
 .
Koska
.
Koska ^2 =1") , saadaan
, saadaan  ja
ja  .
Nyt
.
Nyt ^2 = x^2+y^2-2xy = 23+22=45") , joten
, joten  .
Yhdessä yhtälön kanssa tästä saadaan kaksi kriittistä pistettä
.
Yhdessä yhtälön kanssa tästä saadaan kaksi kriittistä pistettä
/2,(1-3\sqrt{5})/2,-1\big)\text{ ja }
P_2 = \big((1-3\sqrt{5})/2,(1+3\sqrt{5})/2,-1\big).") Kummassakin pisteessä
Kummassakin pisteessä =-11-2 = -13") .
.
Tapaus II (): Neljännestä yhtälöstä nähdään, että
 , ja viimeisen yhtälön perusteella
, ja viimeisen yhtälön perusteella  eli
eli  .
Näin ollen, kriittiset pisteet ovat
.
Näin ollen, kriittiset pisteet ovat
\text{ ja } P_4=(-2,-2,4).") Saadaan
Saadaan
=4-8=-4\text{ ja } f(-2,-2,4)=4+8=12.") Siten funktion maksimi on
Siten funktion maksimi on  ja minimi
ja minimi  .
.
5. PNS-menetelmä
Regressio-ongelma
Regressioanalyysissa pyritään valitsemaan parametrin  arvo siten, että käyrä
arvo siten, että käyrä ") kulkisi mahdollisimman läheltä jokaista havaintopistettä
kulkisi mahdollisimman läheltä jokaista havaintopistettä \in \mathbb{R}^2,\, j=1,2,\ldots ,n.") Tällaista optimaalisesti valittua käyrää kutsutaan regressiomalliksi
Tällaista optimaalisesti valittua käyrää kutsutaan regressiomalliksi ") , jossa funktion muoto on valittu tilanteen ja harkinnan mukaan. Kunhan on valittu, niin eräs ratkaisu käyränsovitusongelmaan on pienimmän neliösumman menetelmä.
, jossa funktion muoto on valittu tilanteen ja harkinnan mukaan. Kunhan on valittu, niin eräs ratkaisu käyränsovitusongelmaan on pienimmän neliösumman menetelmä.
Pienimmän neliösumman menetelmä
Pienimmän neliösumman menetelmässä pyritään minimoimaan regressiomallin virhetermien 
 \, , \quad j=1,2,\ldots ,n") neliösummaa eli funktiota
neliösummaa eli funktiota = \sum_{j=1}^n\varepsilon_j^2 =\sum_{j=1}^n\big(y_j-f(x_j;\beta)\big)^2.") muuttamalla parametrivektorin
muuttamalla parametrivektorin ") arvoa. Optimaalinen :n arvo on parametrin
arvoa. Optimaalinen :n arvo on parametrin  pienimmän neliösumman estimaatti eli PNS-estimaatti.
pienimmän neliösumman estimaatti eli PNS-estimaatti.
Kysymys: Miksi ei minimoitaisi lauseketta |") neliösumman sijasta?
neliösumman sijasta?
PNS-sovitus
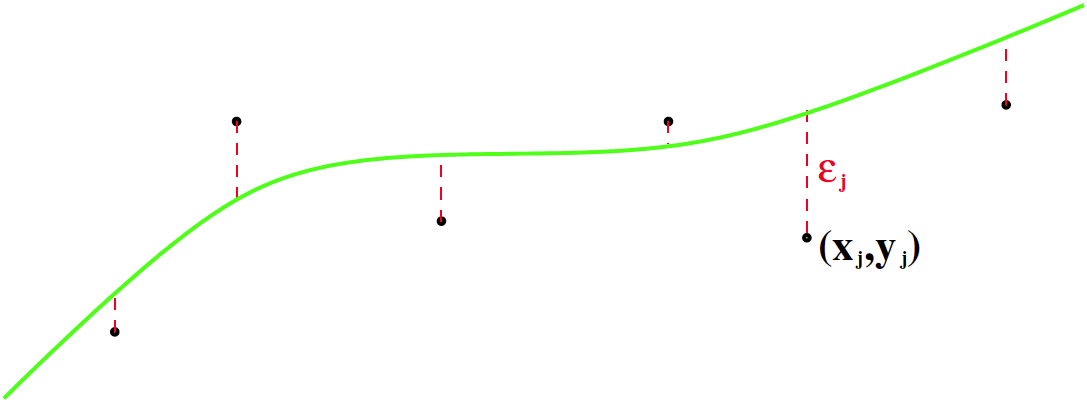
Kuvassa vihreällä parametreista ") riippuva sovitettava funktio
riippuva sovitettava funktio ") eräällä kiinteällä parametrin arvolla. Datapisteet
eräällä kiinteällä parametrin arvolla. Datapisteet ") ja vastaavat virhetermit , kun
ja vastaavat virhetermit , kun  .
.
Lineaarinen regressio
Lineaarisessa regressiossa  = \beta_0-\beta_1 x") jossa
jossa ") ja neliösumma on
ja neliösumma on =\sum_i (y_i -\beta_0-\beta_1 x_i)^2.") Etsitään piste
Etsitään piste ") siten, että
siten, että =0") .
.
Lasketaan osittaisderivaatta  = 2\big(\beta_1\sum_i x_i+n\beta_0-\sum_i y_i\big).") Ratkaistaan nollakohta
Ratkaistaan nollakohta  missä
missä  on datavektorin
on datavektorin ") komponenttien aritmeettinen keskiarvo.
komponenttien aritmeettinen keskiarvo.
Lasketaan seuraavaksi osittaisderivaatta  = 2\big(\beta_0\underbrace{\sum_i x_i}_{=n\overline{x}}+\beta_1\sum_i x_i^2-\sum_i x_iy_i\big).") Sijoittamalla
Sijoittamalla  :n lauseke, saadaan
:n lauseke, saadaan  Ratkaistaan nollakohta:
Ratkaistaan nollakohta: (y_i-\overline{\mathbf{y}})}{\sum_i(x_i-\overline{\mathbf{x}})^2}.") Tarkista jälkimmäinen yhtälö!
Tarkista jälkimmäinen yhtälö!
Esimerkki
Sovita PNS-suora dataan
 | 0.0 | 1.0 | 2.0 | 3.0 | 4.0 |
|---|---|---|---|---|---|
 |
2.10 | 1.92 | 1.84 | 1.71 | 1.64 |
ja estimoi (ekstrapoloi)  kun
kun  .
.
Saadaan  ,
,  , ja
, ja  Siten
Siten  . Näin ollen
. Näin ollen  , ja kysytty estimaatti pisteessä on
, ja kysytty estimaatti pisteessä on  .
.
Esimerkki: Toisen asteen sovitus
Tutkitaan lisäaineen määrän vaikutusta kuivumisaikaan . Eri lisäaineen määrillä (grammaa) saatiin kuivumisajat (tuntia),  :
:
| 0.0 | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 | 7.0 | 8.0 |
|---|---|---|---|---|---|---|---|---|---|
|
11.0 | 9.4 | 9.1 | 7.0 | 6.2 | 7.1 | 6.6 | 7.5 | 8.2 |
Huomataan, että kuivumisajan riippuvuus lisäaineen määrästä on epälineaarista.
Minimikohdan estimoimiseksi sovitetaan havaintoihin paraabeli 
Pienimmän neliösumman yhtälöryhmä mallille on ^2 = 0, \qquad k=0,1,2.") Näistä saadaan yhtälöryhmä
Näistä saadaan yhtälöryhmä  Laskemalla yhtälöryhmän kertoimet havainnoista saadaan
Laskemalla yhtälöryhmän kertoimet havainnoista saadaan 
Ratkaisuna ovat  ,
,  ja
ja  . Pienimmän neliösumman mielessä parhaiten havaintoihin liittyvä paraabeli on siten
. Pienimmän neliösumman mielessä parhaiten havaintoihin liittyvä paraabeli on siten 
6. Newtonin menetelmä
Newtonin iterointi
Newtonin menetelmällä voidaan löytää (vähintäänkin derivoituvan) funktion  nollakohta eli yhtälön
nollakohta eli yhtälön =0") ratkaisu.
Silloin kun menetelmä toimii, se suppenee hyvin nopeasti. Silloin kun ei, niin...
ratkaisu.
Silloin kun menetelmä toimii, se suppenee hyvin nopeasti. Silloin kun ei, niin...
Lähdetään liikkeelle jostakin pisteestä  , joka on alkuarvaus yhtälön ratkaisulle.
Arvioidaan funktiota sen tangenttisuoralla pisteessä, eli funktiolla
, joka on alkuarvaus yhtälön ratkaisulle.
Arvioidaan funktiota sen tangenttisuoralla pisteessä, eli funktiolla =f(x_0)+f'(x_0)(x-x_0)") .
Ratkaistaan yhtälö
.
Ratkaistaan yhtälö =0") . Toistetaan edellinen käyttäen alkuarvauksena lukua
. Toistetaan edellinen käyttäen alkuarvauksena lukua  luvun sijasta jne.
Tämä menettely johtaa algoritmiin, jossa iteraatioaskeleet saadaan kaavasta
luvun sijasta jne.
Tämä menettely johtaa algoritmiin, jossa iteraatioaskeleet saadaan kaavasta
}{f'(x_n)}\,\qquad n=0,1,2,\ldots.") Suppeneminen ja löytyvä nollakohta riippuvat alkuarvauksesta .
Suppeneminen ja löytyvä nollakohta riippuvat alkuarvauksesta .
Esimerkki
Etsitään likiarvo luvulle  .
.
Koska  , niin valitaan
, niin valitaan  läheltä ratkaisua. Tässä
läheltä ratkaisua. Tässä =x^2-5") , joten
, joten =2x") . Saadaan
. Saadaan
}{f'(2)} = 2- \frac{4-5}{2\cdot 2}= \frac{9}{4}.")
}{f'(9/4)} = \frac{9}{4} - \frac{27/16-5}{2\cdot 9/4} = \frac{161}{72}
\approx 2.2361.")
Huomaa, että  , eli jo kahdella iteraatiolla saatiin varsin hyvä likiarvo.
, eli jo kahdella iteraatiolla saatiin varsin hyvä likiarvo.
Esimerkki
Etsitään funktion =x^3-x+1") nollakohdat.
nollakohdat.
Piirtämällä kuvaaja nähdään, että funktiolla on vain yksi nollakohta jossain pisteiden  ja
ja  välissä. Asetetaan
välissä. Asetetaan  .
.
Koska =3x^2-1") iteratioksi saadaan
iteratioksi saadaan
 Saadaan
Saadaan


Newtonin menetelmä monen muuttujan tapauksessa
Newtonin menetelmä toimii myös funktion  tapauksessa.
Tällöin iteraatiokaavassa oleva derivaatta pitää korvata Jacobin matriisilla
tapauksessa.
Tällöin iteraatiokaavassa oleva derivaatta pitää korvata Jacobin matriisilla
 =
\begin{bmatrix}
\frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n}\\
\frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n}\\
\vdots & \vdots & & \vdots \\
\frac{\partial f_m}{\partial x_1} & \frac{\partial f_m}{\partial x_2} & \cdots & \frac{\partial f_m}{\partial x_n}
\end{bmatrix}.") Iteraatioaskeleeksi saadaan
Iteraatioaskeleeksi saadaan
^{-1}\mathbf{f}(\mathbf{x}_n), \quad n=0,1,2,\ldots,") missä
missä ^{-1}") on
on ") :n käänteismatriisi.
:n käänteismatriisi.
Esimerkki
Etsitään =\mathbf{0}") , kun
, kun ") ja
ja
=(x^2+y^2+z^2-3)\mathbf{i} + (x^2+y^2-z-1)\mathbf{j} +(x+y+z-3)\mathbf{k}.")
Saadaan
=\begin{bmatrix}2x &2y & 2z\\ 2x&2y&-1\\ 1&1&1\end{bmatrix}") ja voidaan laskea
ja voidaan laskea
,\quad \mathbf{x}_2 = (5/4,3/4,1)\quad \text{ ja }\quad \mathbf{x}_2 = (9/8,7/8,1),") mikä on terveellisintä tehdä tietokoneella.
mikä on terveellisintä tehdä tietokoneella.
Nähdään, että iteraatiot konvergoivat kohti pistettä ") ,
joka on tehtävän tarkka (ja kaikesta päätellen ainoa) ratkaisu.
,
joka on tehtävän tarkka (ja kaikesta päätellen ainoa) ratkaisu.
7. Taso- ja avaruusintegraalit
7.1. Tasointegraali
Tasointegraali
Olkoon joukko tasossa ja skalaarikenttä. Halutaan määritellä tasointegraali \,dA.") Integraalin arvo on pinnan ja -tason väliin jäävän alueen tilavuus.
Integraalin arvo on pinnan ja -tason väliin jäävän alueen tilavuus.
Tutkitaan aluksi erikoistapausta ![D=[a,b]\times [c,d]](https://mycourses.aalto.fi/filter/tex/pix.php/9f6016ad24de0832985e8558f48470c2.gif "D=[a,b]\times [c,d]") .
.
Yhden muuttujan tapaus
Yhden muuttujan tapauksessa integraali saadaan Riemannin summien raja-arvona.
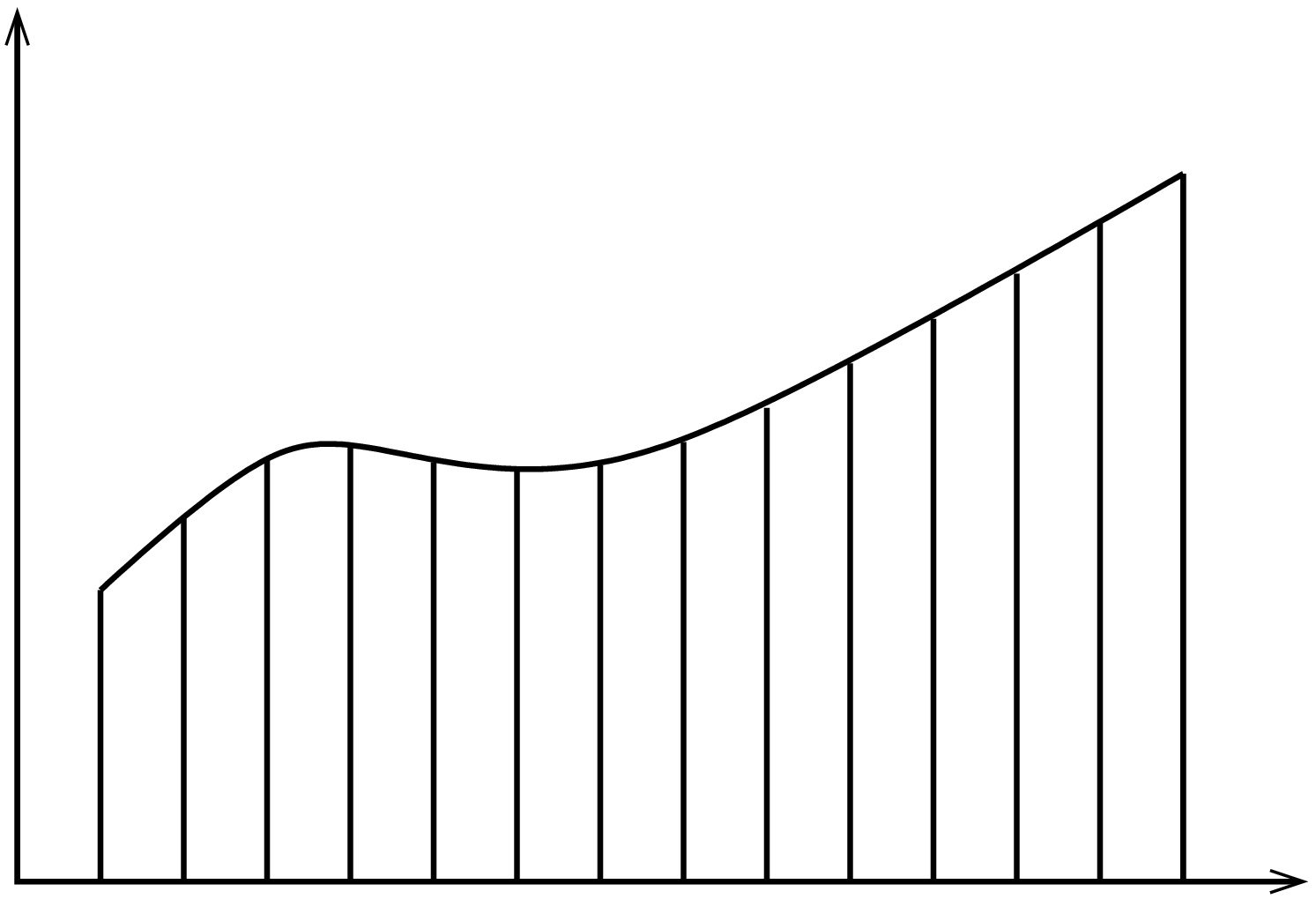
Formaalisti \,dx = \lim_{n\to\infty} \sum_{i=1}^n f(x_i)\Delta x,") missä
missä  on välin tasavälinen jako ja
on välin tasavälinen jako ja  on jakovälin pituus.
on jakovälin pituus.
Usean muuttujan tapaus (tasointegraali,  )
)
Jaetaan tason osajoukko tasavälisesti ruudukoksi niin, että kummallakin akselilla on jakopistettä.
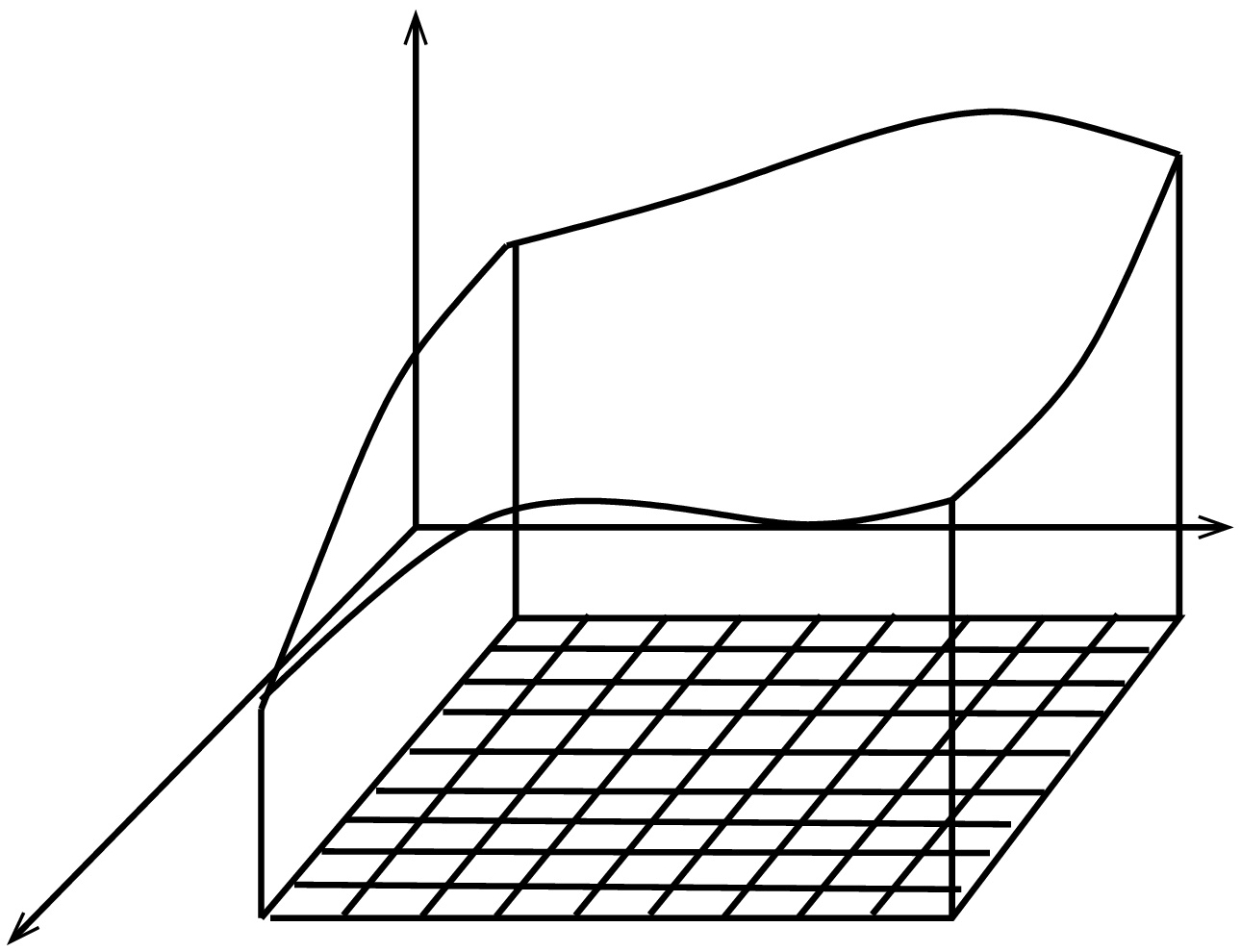
Nyt voidaan määritellä \,dA = \lim_{n\to\infty} \sum_{i=1}^n\sum_{j=1}^n f(x_i,y_j)\,\Delta x\Delta y,") missä
missä  ja sekä
ja sekä  vastaavat jakovälien pituutta ja -suunnassa:
vastaavat jakovälien pituutta ja -suunnassa: 
Huomautuksia
Yhden muuttujan tapauksessa integraaleille pätee Analyysin (ensimmäinen) peruslause: ![f(x)=\frac{d}{dx}\int_c^x f(t)\,dt,\textrm{ kun }c,x\in[a,b]](https://mycourses.aalto.fi/filter/tex/pix.php/142579790fdbdca671697cb8ba0740cc.gif "f(x)=\frac{d}{dx}\int_c^x f(t)\,dt,\textrm{ kun }c,x\in[a,b]") ja
ja ![f\colon [a,b]\to\mathbb{R}](https://mycourses.aalto.fi/filter/tex/pix.php/63f70baa16a71438df78c61a2f6709f2.gif "f\colon [a,b]\to\mathbb{R}") on jatkuva funktio.
on jatkuva funktio.
Analyysin peruslauseesta seuraa, että integrointi ja derivointi ovat toistensa vastaoperaatiota, mikä johtaa moniin integroinnissa hyödyllisiin kaavoihin. Analyysin peruslauseella ei kuitenkaan ole aivan samanlaista vastinetta usean muuttujan tapauksessa; Greenin, Gaussin ja Stokesin lauseet ovat kuitenkin sille sukua.
Moninkertainen integraali
Monen muuttujan integraaleja voidaan usein kuitenkin laskea moninkertaisina integraaleina. Kaksiulotteinen tapaus (integrointialue suorakulmio) ![\iint_D f(x,y)\,dA = \int_c^d \int_a^b f(x,y)\,dx\,dy, \text{ kun } D=[a,b]\times [c,d].](https://mycourses.aalto.fi/filter/tex/pix.php/130a8aa2f794eb9ce5b967db988f8751.gif "\iint_D f(x,y)\,dA = \int_c^d \int_a^b f(x,y)\,dx\,dy, \text{ kun } D=[a,b]\times [c,d].")
Mikäli funktio  on jatkuva, niin integroimisjärjestyksellä ei ole väliä integraalin arvon kannalta. Laskujen helppouden kannalta väliä kuitenkin on.
on jatkuva, niin integroimisjärjestyksellä ei ole väliä integraalin arvon kannalta. Laskujen helppouden kannalta väliä kuitenkin on.
Esimerkki
Olkoon =xy^2") . Lasketaan
. Lasketaan \,dA,\text{ kun } D=\{(x,y)\in \mathbb{R}^2: 0\le x\le1, \,0\le y\le 1\}.")
Aluksi kirjoitetaan tasointegraali kaksinkertaisena integraalina, ja lasketaan \begin{align*} \iint_D xy^2\,dA &= \int_0^1\int_0^1 xy^2\,dx\,dy = \int_0^1\bigg[\frac{x^2y^2}{2}\bigg]_{x=0}^{1}\,dy \\ &= \int_0^1 \frac{y^2}{2}\,dy \bigg[\frac{y^3}{6}\bigg]_{y=0}^1 = \frac{1}{6}. \end{align*}
Integrointi yleisemmissä alueissa
Tutkitaan funktiota , joka on määritelty tason osajoukossa . Tähän asti on oletettu, että on suorakulmio. Yleisemmässä tapauksessa voidaan tarkastella suorakulmiota  , jolle
, jolle  . Jotta integraali olisi määritelty, täytyy joukon olla ''siisti'' (riittää esimerkiksi, että reuna on paloittain sileä).
. Jotta integraali olisi määritelty, täytyy joukon olla ''siisti'' (riittää esimerkiksi, että reuna on paloittain sileä).
Määritellään funktio  seuraavasti:
seuraavasti:  = \left\{ \begin{array}{rcl} f(x,y), &\text{kun} &(x,y) \in D,\\ 0, & \text{kun} & (x,y) \in \hat D \setminus D. \end{array}\right.") Nyt voidaan määritellä
Nyt voidaan määritellä \,dA := \iint_{\hat D} \hat f(x,y)\,dA.") Samaan tapaan voidaan määritellä myös avaruusintegraali ei-suorakulmaisen integroimisalueen tapauksessa:
Samaan tapaan voidaan määritellä myös avaruusintegraali ei-suorakulmaisen integroimisalueen tapauksessa: \,dV := \iiint_{\hat D} \hat f(x,y,z)\,dV,") kun on suorakulmainen särmiö ja
kun on suorakulmainen särmiö ja  .
.
Esimerkki
Olkoon \in \mathbb{R}^2 : 0 < x < 1,\, 0 < y < x\}") . Lasketaan funktion
. Lasketaan funktion =xy") integraali yli alueen .
integraali yli alueen .
\begin{align*} &\iint_D xy\,dA = \int_0^1\bigg(\int_0^x xy\,dy\bigg)dx \\ &\quad \int_0^1\frac{xy^2}{2}\bigg|_{y=0}^x\,dx = \int_0^1\frac{x^3}{2}\,dx = \frac{x^4}{8}\bigg|_{x=0}^1 =\frac{1}{8}. \end{align*} Integrointi on mahdollista suorittaa myös toisessa järjestyksessä: \begin{align*} &\iint_D xy\,dA = \int_0^1\bigg(\int_y^1 xy\,dx\bigg)dy \\ &\quad = \int_0^1\frac{x^2y}{2}\bigg|_{x=y}^1\,dy = \int_0^1\frac{y}{2}-\frac{y^3}{2}\,dy \\ &\quad = \bigg[\frac{y^2}{4}-\frac{y^4}{8}\bigg]_{y=0}^1 = \frac{1}{4}-\frac{1}{8} = \frac{1}{8}. \\ \end{align*}
Esimerkki
Lasketaan funktion =e^{x^2}") integraali edellisen esimerkin alueessa.
integraali edellisen esimerkin alueessa.
dx =\int_0^1 xe^{x^2}\,dx") Sijoituksella
Sijoituksella  ,
,  saadaan
saadaan 
dy") on "hyvin vaikea" laskea.
on "hyvin vaikea" laskea.7.2. Avaruusintegraali
Usean muuttujan tapaus (avaruusintegraali, )
Tasointegraalia mukaillen voidaan samaan tapaan määritellä avaruusintegraali: \,dV = \lim_{n\to\infty} \sum_{i=1}^n\sum_{j=1}^n\sum_{k=1}^n f(x_i,y_j,z_k)\,\Delta x\Delta y\Delta z,") kun
kun ![D=[a_1,b_1]\times [a_2,b_2]\times[a_3,b_3] \subset \mathbb{R}^2](https://mycourses.aalto.fi/filter/tex/pix.php/1b7f8ae96ce60ae2c94364916e82ebee.gif "D=[a_1,b_1]\times [a_2,b_2]\times[a_3,b_3] \subset \mathbb{R}^2") ja . Tässä
ja . Tässä  Vieläkin useamman muuttujan funktioita , missä , voi integroida samaan tapaan.
Vieläkin useamman muuttujan funktioita , missä , voi integroida samaan tapaan.
Huomautuksia
Yhden muuttujan tapauksessa integraaleille pätee Analyysin (ensimmäinen) peruslause: ja on jatkuva funktio.
Analyysin peruslauseesta seuraa, että integrointi ja derivointi ovat toistensa vastaoperaatiota, mikä johtaa moniin integroinnissa hyödyllisiin kaavoihin. Analyysin peruslauseella ei kuitenkaan ole aivan samanlaista vastinetta usean muuttujan tapauksessa; Greenin, Gaussin ja Stokesin lauseet ovat kuitenkin sille sukua.
Moninkertainen integraali
Monen muuttujan integraaleja voidaan usein kuitenkin laskea moninkertaisina integraaleina. Kolmiulotteinen tapaus (integrointialue suorakulmainen särmiö) \,dV = \int_{a_3}^{b_3}\int_{a_2}^{b_2}\int_{a_1}^{b_1} f(x,y,z)\,dx\,dy\,dz,") kun
kun ![D=[a_1,b_1]\times [a_2,b_2]\times [a_3,b_3]](https://mycourses.aalto.fi/filter/tex/pix.php/698a7e1b8e7c18d974f5d5e90aa37ae3.gif "D=[a_1,b_1]\times [a_2,b_2]\times [a_3,b_3]") .
.
Mikäli funktio  on jatkuva, niin integroimisjärjestyksellä ei ole väliä integraalin arvon kannalta. Laskujen helppouden kannalta väliä kuitenkin on.
on jatkuva, niin integroimisjärjestyksellä ei ole väliä integraalin arvon kannalta. Laskujen helppouden kannalta väliä kuitenkin on.
Esimerkki
Olkoon=xye^z") . Lasketaan
. Lasketaan ![\iiint_D f(x,y,z)\,dV,\text{ missä } D=[0,2]\times [0,1] \times [-1,1].](https://mycourses.aalto.fi/filter/tex/pix.php/7f3a53ca5d83258514f7ab3bc5319ec8.gif "\iiint_D f(x,y,z)\,dV,\text{ missä } D=[0,2]\times [0,1] \times [-1,1].")
Kirjoitetaan avaruusintegraali kolminkertaisena integraalina. Lasketaan \begin{align*} &\iiint_D xye^z\,dV = \int_{-1}^1\int_0^1\int_0^2 xye^z\,dx\,dy\,dz \\ &\quad = \int_{-1}^1\int_0^1 \frac{x^2ye^z}{2}\bigg|_{x=0}^2\,dy\,dz = \int_{-1}^1\int_0^1 2ye^z\,dy\,dz \\ &\quad = \int_{-1}^1 y^2e^z\bigg|_{y=0}^1\,dz = \int_{-1}^1 e^z\,dz = e^z\Big|_{z=-1}^1 = e -e^{-1}. \end{align*}
Integrointi yleisemmissä alueissa
Tutkitaan funktiota , joka on määritelty avaruuden osajoukossa . Tähän asti on oletettu, että on suorakulmainen särmiö. Yleisemmässä tapauksessa voidaan tarkastella suorakulmaista särmiötä , jolle . Jotta integraali olisi määritelty, täytyy joukon olla ''siisti'' (riittää esimerkiksi, että reuna on paloittain sileä).
Määritellään funktio seuraavasti: Nyt voidaan määritellä avaruusintegraali ei-suorakulmaisen integroimisalueen tapauksessa: kun on suorakulmainen särmiö ja .
7.3. Taso- ja avaruusintegraalien sovelluksia
Moninkertaisten integraalien sovelluksia
Tähän mennessä moninkertaisten integraalien sovelluksina on esiintynyt:
Alueen
 pinta-ala
pinta-ala
 = \iint_D 1\,dA")
- Kappaleen
 tilavuus
tilavuus
 = \iiint_D 1\,dV")
Mekaniikassa tulevat lisäksi vastaan nämä:
Kappaleen massa
 = \iiint_D \rho(x,y,z)\,dV") ja hitausmomentti kappaleen pyöriessä -akselin ympäri:
ja hitausmomentti kappaleen pyöriessä -akselin ympäri:
 = \iiint_D\rho(x,y,z)(x^2+y^2)\,dV.") Tässä
Tässä ") on materiaalin tiheys pisteessä .
on materiaalin tiheys pisteessä .Kaksiulotteisen tasolevyn keskiön (painopiste)
") laskeminen
laskeminen
} \iint_D x\,dA, \qquad
\bar y = \frac{1}{A(D)} \iint_D y\,dA,") jossa pinta-ala
jossa pinta-ala ") on laskettu tasointegraalilla jo aiemmin.
on laskettu tasointegraalilla jo aiemmin.Jos levyn massa ei ole tasaisesti jakautunut, integraalia korjataan paikasta riippuvalla tiheydellä
")
} \iint_D x \rho(x,y) \,dA, \qquad
\bar y = \frac{1}{m(D)} \iint_D y \rho(x,y) \,dA.") jossa massa
jossa massa  = \iint_D \rho(x,y) \,dA") lasketaan tasointegraalilla.
lasketaan tasointegraalilla.
Massakeskipiste
Kolmiulotteisen kappaleen massakeskipiste ")
} \iiint_D x \rho(x,y,z)\,dV,")
} \iiint_D y \rho(x,y,z)\,dV,")
} \iiint_D z \rho(x,y,z)\,dV,") missä
missä ") on kappaleen tiheys pisteessä
ja
on kappaleen tiheys pisteessä
ja ") on kappaleen massa (tilavuusintegraalilla).
Kaava voidaan kirjoittaa myös vektorimuodossa
on kappaleen massa (tilavuusintegraalilla).
Kaava voidaan kirjoittaa myös vektorimuodossa
 missä
missä  .
.
Esimerkki
Lasketaan epäyhtälöiden  ,
,  ja
ja  määräämän yksikkökuution massakeskipiste, kun tiheys
määräämän yksikkökuution massakeskipiste, kun tiheys = z") .
.
Huomautus. Yksikkökuutio voidaan myös määritellä käyttäen niin kutsuttua karteesista tuloa:
![D = [0,1] \times [0,1] \times [0,1] = [0,1]^3.](https://mycourses.aalto.fi/filter/tex/pix.php/b48ea9f898096948af587144d5873259.gif "D = [0,1] \times [0,1] \times [0,1] = [0,1]^3.") Tämä merkintätapa tarkoittaa samaa kuin ylläoleva määritelmä epäyhtälöiden avulla.
Tämä merkintätapa tarkoittaa samaa kuin ylläoleva määritelmä epäyhtälöiden avulla.
Lasketaan ensin massa

 Saadaan
Saadaan
\Big(\Big|_{z=0}^1 \frac{1}{2}z^2\Big)}{1/2}")
^2}{1/2} = \frac{1}{2}.")
Vastaavasti
^2}{1/2} = \frac{1}{2}.") Edelleen voidaan laskea
Edelleen voidaan laskea

}{(1/2)} = \frac{2}{3}.") Massakeskipisteeksi saadaan
Massakeskipisteeksi saadaan
 = (1/2,1/2,2/3).")
Hitausmomentti
Tarkastellaan tilannetta, jossa pistemäiset kappaleet kiertävät origoa -tasossa ympyrän muotoista rataa pitkin
samalla kulmanopeudella.
Kappaleiden yhteenlaskettu liike-energia saadaan laskemalla summa
![E= \sum_{i=1}^N \frac{1}{2} m_iv_i^2= \frac{1}{2} \Big[\sum_{i=1}^N m_i r_i^2\Big]\omega^2= \frac{1}{2}\Big[\sum_{i=1}^N m_i(x_i^2+y_i^2)\Big]\omega^2,](https://mycourses.aalto.fi/filter/tex/pix.php/a0a2db51ec02c4ba815fca426f88d181.gif "E= \sum_{i=1}^N \frac{1}{2} m_iv_i^2= \frac{1}{2} \Big[\sum_{i=1}^N m_i r_i^2\Big]\omega^2= \frac{1}{2}\Big[\sum_{i=1}^N m_i(x_i^2+y_i^2)\Big]\omega^2,") missä
missä  on kulmanopeus ja
on kulmanopeus ja  , sekä ovat
, sekä ovat  :nnen kappaleen massa ja paikka.
Summaa
:nnen kappaleen massa ja paikka.
Summaa
 = \sum_{i=1}^N m_i r_i^2") kutsutaan hitausmomentiksi.
Ajattelemalla -akselin ympäri pyörivä kappale joukoksi "infinitesimaalisen pieniä" pisteitä, voidaan edelläolevasta summasta päätellä kappaleen liike-energia:
kutsutaan hitausmomentiksi.
Ajattelemalla -akselin ympäri pyörivä kappale joukoksi "infinitesimaalisen pieniä" pisteitä, voidaan edelläolevasta summasta päätellä kappaleen liike-energia:
![E=\frac{1}{2} \bigg[ \iiint_D (x^2+y^2)\rho(x,y,z)\,dV\bigg]\omega^2
=\frac{1}{2} I_z\omega^2,](https://mycourses.aalto.fi/filter/tex/pix.php/9d88f174f894c7b3fbbdb03af14d8cf2.gif "E=\frac{1}{2} \bigg[ \iiint_D (x^2+y^2)\rho(x,y,z)\,dV\bigg]\omega^2
=\frac{1}{2} I_z\omega^2,") missä
missä
\rho(x,y,z)\,dV = \iiint_D r_z^2 dm") on kappaleen hitausmomentti -akselin suhteen (
on kappaleen hitausmomentti -akselin suhteen ( ja massa-alkio
ja massa-alkio
\,dV") ).
).
Esimerkki
Lasketaan sylinterin
: x^2+y^2\le a^2\textrm{ ja }0\le z\le 1\},\qquad a>0") hitausmomentti -akselin suhteen, kun tiheys on vakio
hitausmomentti -akselin suhteen, kun tiheys on vakio  .
.
Lasketaan
\rho_0\,dV")

 Toisaalta sylinterin massa on
Toisaalta sylinterin massa on
=\rho_0\pi a^2.") Siten hitausmomentti voidaan kirjoittaa
Siten hitausmomentti voidaan kirjoittaa
a^2 = \frac{1}{2}ma^2.")
7.4. Yleinen muuttujanvaihto
Muuttujanvaihto tasointegraaleissa
Tutkitaan funktiota  , missä ja
, missä ja  ovat :n osajoukkoja. Oletetaan, että funktion
ovat :n osajoukkoja. Oletetaan, että funktion  kaikki osittaisderivaatat ovat olemassa ja jatkuvia. Lisäksi oletetaan, että on bijektio: Jokaista pistettä
kaikki osittaisderivaatat ovat olemassa ja jatkuvia. Lisäksi oletetaan, että on bijektio: Jokaista pistettä  \in D") vastaa yksikäsitteinen piste
vastaa yksikäsitteinen piste \in G") , jolle
, jolle = (x,y)") . Tällöin erityisesti
. Tällöin erityisesti ") .
.
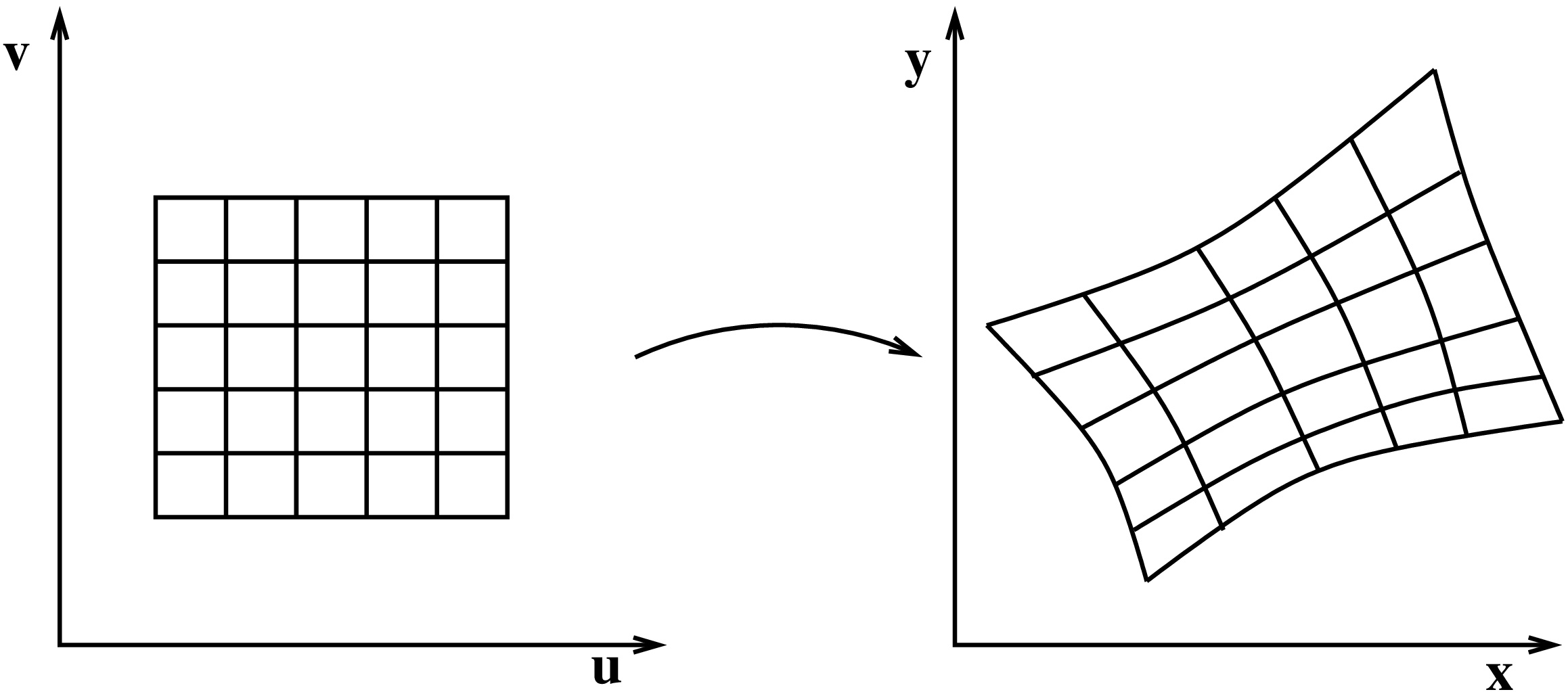
,y(u,v)\big)=\mathbf{F}(u,v)")
Tutkitaan aluksi muuttujanvaihtoa tasointegraalin tapauksessa: \,dx\,dy = \iint_{G} ??? \,du\,dv.") Tarvitaan tieto siitä, miten pinta-ala skaalautuu funktiossa
Tarvitaan tieto siitä, miten pinta-ala skaalautuu funktiossa  = \mathbf{F}(u,v)") .
.
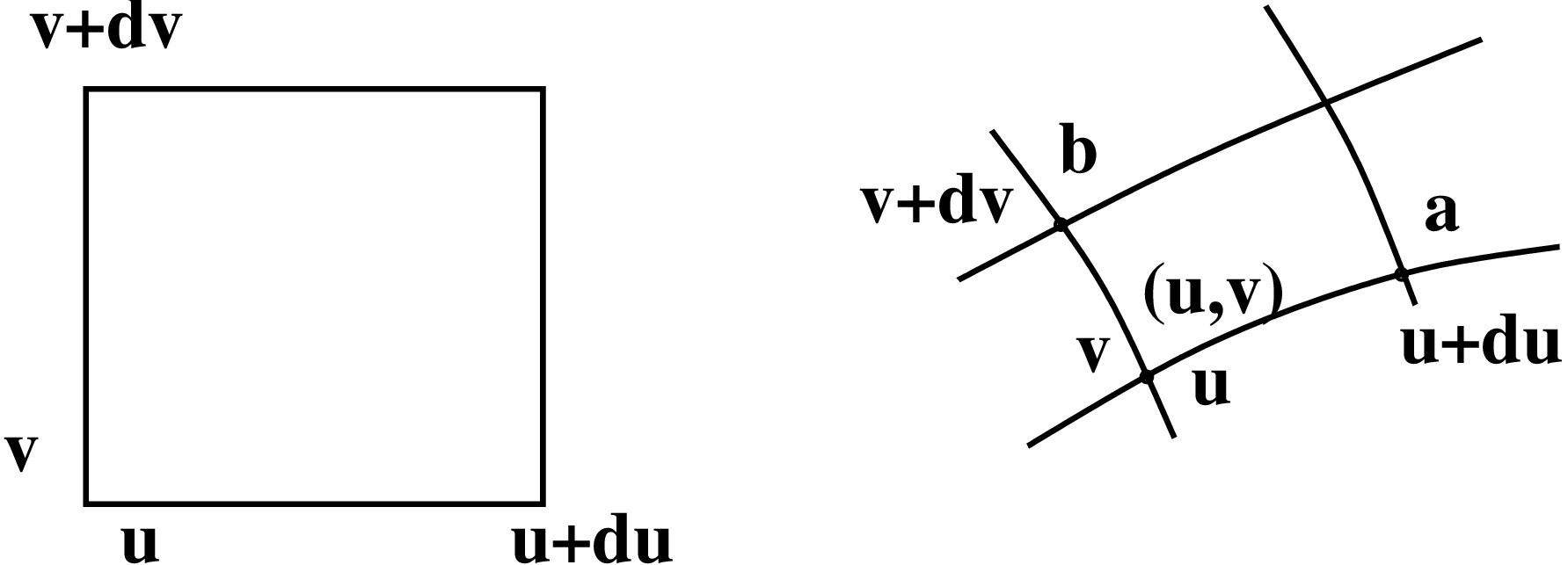
 (vast.
(vast.  ) sijaitsee käyrällä, jolla
) sijaitsee käyrällä, jolla  (vast.
(vast.  ) on vakio. Koska funktiolla on jatkuvat osittaisderivaatat, käyrät ovat sileitä.
) on vakio. Koska funktiolla on jatkuvat osittaisderivaatat, käyrät ovat sileitä.Ketjusäännöllä  Edettäessä vektorin suuntaan -koordinaateissa, koordinaatti on vakio ja siten
Edettäessä vektorin suuntaan -koordinaateissa, koordinaatti on vakio ja siten  . Saadaan
. Saadaan  Samaan tapaan voidaan päätellä, että
Samaan tapaan voidaan päätellä, että  Tässä
Tässä  ja
ja  ovat koordinaattiakseleiden suuntaiset yksikkövektorit.
ovat koordinaattiakseleiden suuntaiset yksikkövektorit.
Approksimaatiokaava pinta-alaelementin  muutokselle siis on
muutokselle siis on  Käytetään merkintää (huom. neliömatriiseille
Käytetään merkintää (huom. neliömatriiseille  )
) \big|\,du\,dv.") Determinantti
Determinantti ") on funktion
on funktion  Jacobin determinantti. Sille käytetään myös merkintää
Jacobin determinantti. Sille käytetään myös merkintää =\frac{\partial(x,y)}{\partial(u,v)} \text{ kun } (x,y) = \mathbf{F}(u,v).")
Jacobin determinantin itseisarvo |") kertoo paikallisen pinta-alan muutoksen kuvattaessa -koordinaattien infinitesimaalinen pinta-ala
kertoo paikallisen pinta-alan muutoksen kuvattaessa -koordinaattien infinitesimaalinen pinta-ala  vastaavalle -koordinaateissa lausutulle pinta-alalle
vastaavalle -koordinaateissa lausutulle pinta-alalle  funktion välityksellä.
funktion välityksellä.
Tasointegraalin muuttujanvaihtokaavaksi siis saadaan  \,dx\,dy = \iint_{G} g(u,v) \big | \det D\mathbf{F} (u,v)\big| \,du\,dv") missä
missä =f(x(u,v),y(u,v))") ja . Tässä on integroimisalueiden ja välinen bijektio. Jacobin determinantin etumerkki kertoo, onko suunnan säilyttävä vai kääntävä. Itseisarvo tarvitaan, jotta positiivisen funktion integraali ei muuttuisi negatiiviseksi eräillä .
ja . Tässä on integroimisalueiden ja välinen bijektio. Jacobin determinantin etumerkki kertoo, onko suunnan säilyttävä vai kääntävä. Itseisarvo tarvitaan, jotta positiivisen funktion integraali ei muuttuisi negatiiviseksi eräillä .
Esimerkki
Lasketaan neljän paraabelin  ,
,  ,
,  ja
ja  rajoittamaan alueen pinta-ala.
rajoittamaan alueen pinta-ala.
Huomataan, että integroimisalue kuvautuu suorakulmioksi ![G = [1/2 , 1] \times [1/3 , 1]](https://mycourses.aalto.fi/filter/tex/pix.php/f1c9f915649ee6dd8d38f38afa355761.gif "G = [1/2 , 1] \times [1/3 , 1]") muunnoksella
muunnoksella  = u\mathbf{i} + v\mathbf{j}, \quad u(x,y)=\frac{x^2}{y},\,\,v(x,y)=\frac{y^2}{x}.")
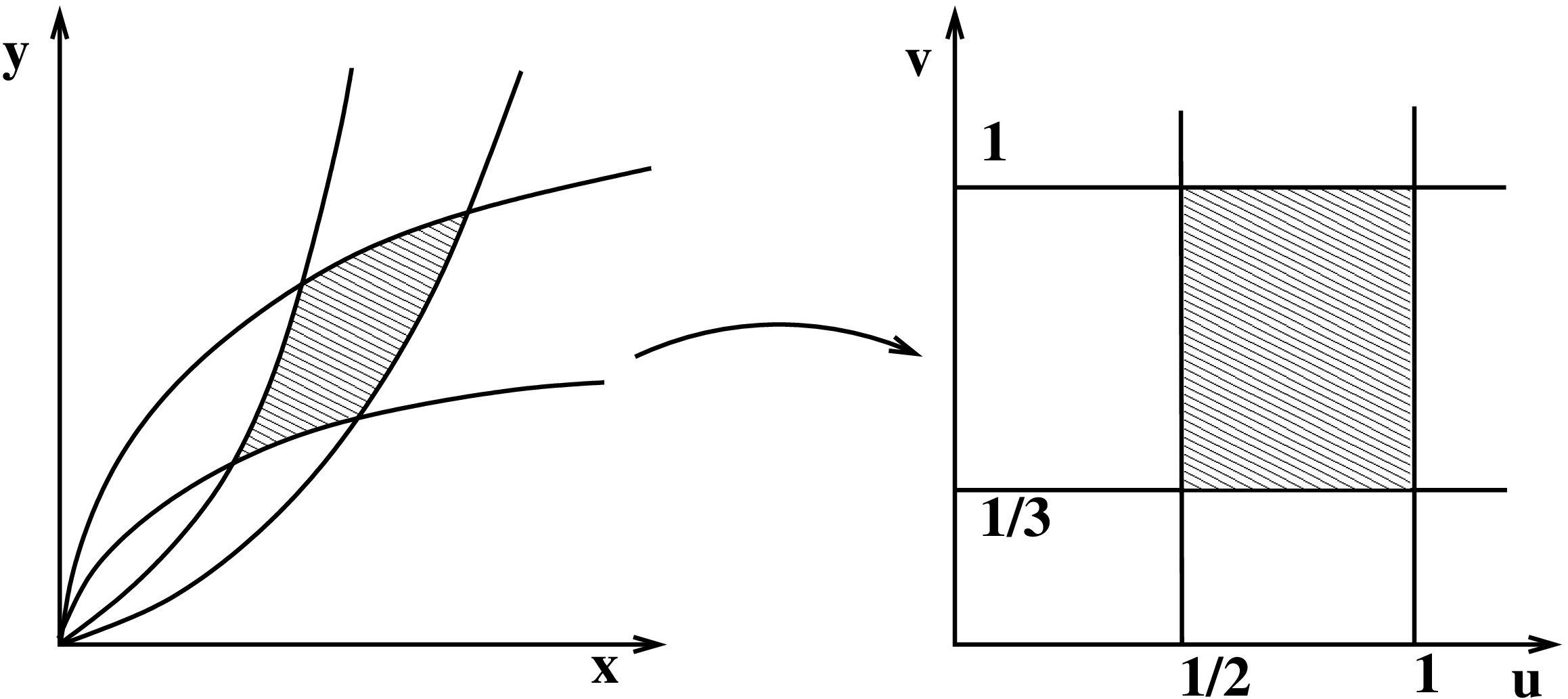
Halutaan kuitenkin käänteiskuvaus  , joka vie koordinaatit käyräviivaisille -koordinaateille. Lineaarialgebran perusteella
, joka vie koordinaatit käyräviivaisille -koordinaateille. Lineaarialgebran perusteella =\frac{1}{\det D \mathbf{G}(x,y)}.") Lasketaan
Lasketaan  Saadaan myös
Saadaan myös 
Lasketaan edelleen  = \left|\begin{array}{cc} \frac{\partial u}{\partial x} & \frac{\partial u}{\partial y} \\ \frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} \end{array}\right| = \left|\begin{array}{cc} \frac{2x}{y} & -\frac{x^2}{y^2} \\ -\frac{y^2}{x^2} & \frac{2y}{x} \end{array}\right|")
\big|=\frac{1}{3}.") Tulokseksi siis saadaan
Tulokseksi siis saadaan  Yleensä ei käy niin onnellisesti, että sama koordinaatistomuunnos vie integroitavan alueen suorakulmiolle samalla kun integroitava funktio menee vakioksi.
Yleensä ei käy niin onnellisesti, että sama koordinaatistomuunnos vie integroitavan alueen suorakulmiolle samalla kun integroitava funktio menee vakioksi.
7.5. Muuttujanvaihto tasointegraalissa
Napakoordinaatit
Piste \in \mathbb{R}^2") voidaan kirjoittaa muodossa
voidaan kirjoittaa muodossa ") , missä
, missä  ja
ja  . Napakulma
. Napakulma  on yksikäsitteinen jos
on yksikäsitteinen jos  .
.
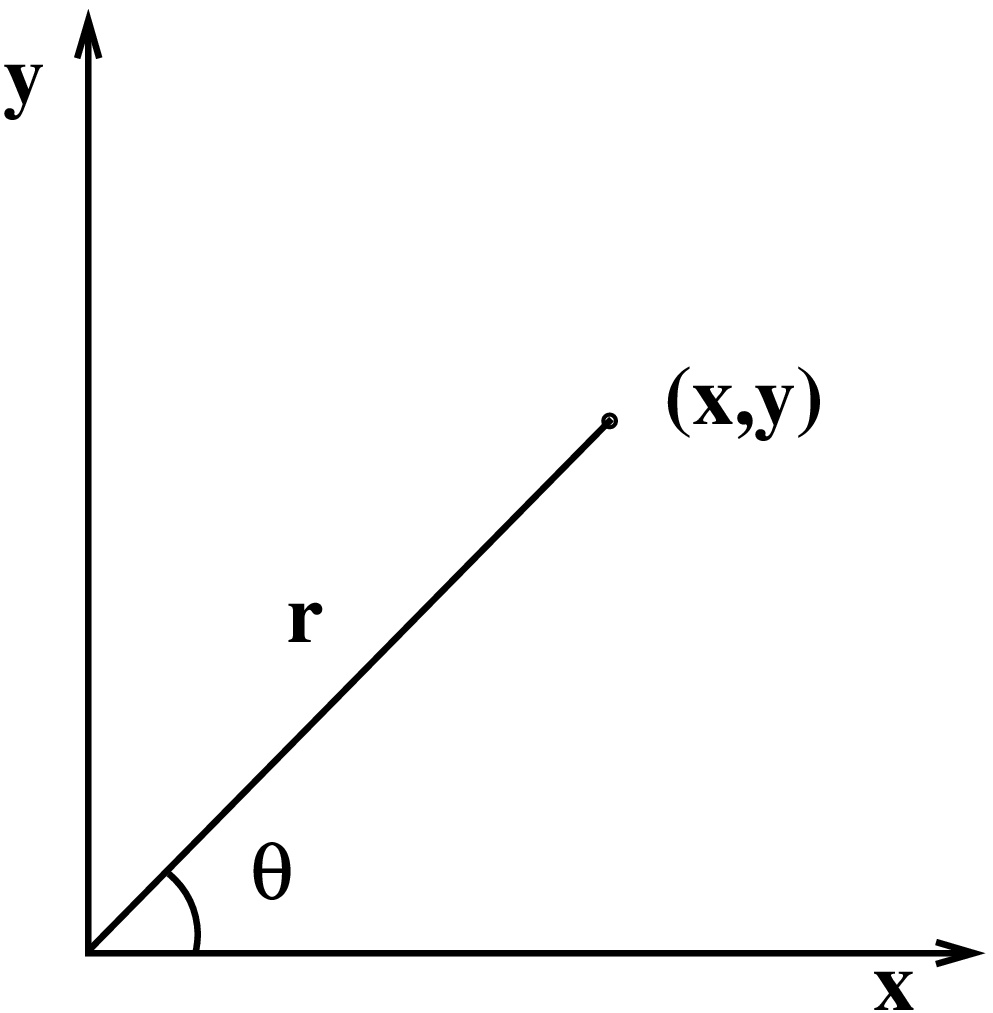
Alkeisgeometriasta saadaan kaavat  Vrt. kompleksiluvun polaarimuoto
Vrt. kompleksiluvun polaarimuoto  .
.
Koordinaatistomuunnoksen  \mapsto (x,y)") Jacobin determinantille saadaan kaava
Jacobin determinantille saadaan kaava }{\partial (r,\theta)} = \left|\begin{array}{cc} \frac{\partial x}{\partial r} & \frac{\partial x}{\partial \theta}\\ \frac{\partial y}{\partial r} & \frac{\partial y}{\partial \theta} \end{array}\right| = \left|\begin{array}{cc} \cos \theta & -r\sin \theta\\ \sin \theta & r\cos\theta \end{array}\right| = r.") Siten muuttujanvaihtokaavaa varten saadaan pinta-alan venytys
Siten muuttujanvaihtokaavaa varten saadaan pinta-alan venytys }{\partial (r,\theta)}\bigg| \,dr\,d\theta = r\,dr\,d\theta.") Tasointegraali napakoordinaateissa
Tasointegraali napakoordinaateissa \,dx\,dy = \iint_G g(r,\theta)r\,dr\,d\theta,") missä
missä  = f(r\cos\theta,r\sin\theta)") .
.
Esimerkki
(i) Olkoon \in \mathbb{R}^2 : 1 < x^2 + y^2 < 4\rbrace") . Lasketaan napakoordinaateissa integraali
. Lasketaan napakoordinaateissa integraali  Saadaan
Saadaan 
(ii) Integraali  on erittäin tärkeä mm. todennäköisyyslaskennassa ja tilastotieteessä. Tämä integraali on vaikea, koska integraalifunktiota ei ole mahdollista kirjoittaa alkeisfunktioiden avulla.
on erittäin tärkeä mm. todennäköisyyslaskennassa ja tilastotieteessä. Tämä integraali on vaikea, koska integraalifunktiota ei ole mahdollista kirjoittaa alkeisfunktioiden avulla.
Integraali on kuitenkin mahdollista laskea seuraavan tempun avulla: Huomataan aluksi, että ^2.") Laskemalla epäoleellinen tasointegraali napakoordinaateissa
Laskemalla epäoleellinen tasointegraali napakoordinaateissa 
 e^{-r^2}\,dr}.")
Nyt  , joten integraaliksi saadaan:
, joten integraaliksi saadaan:  e^{-r^2}\,dr = e^{-R^2} - 1") Viemällä
Viemällä  tulee
tulee  ja siitä alkuperäisen integraalin arvo
ja siitä alkuperäisen integraalin arvo  Miksi temppu toimi?
Miksi temppu toimi?
7.6. Muuttujanvaihto avaruusintegraalissa
Muuttujanvaihto avaruusintegraalissa
Muunnoskaavat  \mapsto (x,y,z)") ovat
ovat ,\\ y=y(u,v,w),\\ z=z(u,v,w). \end{array}\right.") Tällöin
Tällöin }{\partial (u,v,w)}\bigg|\,du\,dv\,dw,") missä
missä }{\partial (u,v,w)} = \left|\begin{array}{ccc} \frac{\partial x}{\partial u} & \frac{\partial x}{\partial v} & \frac{\partial x}{\partial w} \\ \frac{\partial y}{\partial u} & \frac{\partial y}{\partial v} & \frac{\partial y}{\partial w}\\ \frac{\partial z}{\partial u} & \frac{\partial z}{\partial v} & \frac{\partial z}{\partial w} \end{array}\right|.") Jos siis
Jos siis  = f(x(u,v,w),y(u,v,w),z(u,v,w))") , niin
, niin \,dx\,dy\,dz = \iiint_G g(u,v,w)\, \bigg|\frac{\partial(x,y,z)}{\partial (u,v,w)}\bigg|\,du\,dv\,dw.")
Sylinterikoordinaatit
Koordinaatit") , missä
, missä  ,
,  ,
,  . Suoralla
. Suoralla  (eli -akselilla) napakulma ei ole yksikäsitteinen.
(eli -akselilla) napakulma ei ole yksikäsitteinen.
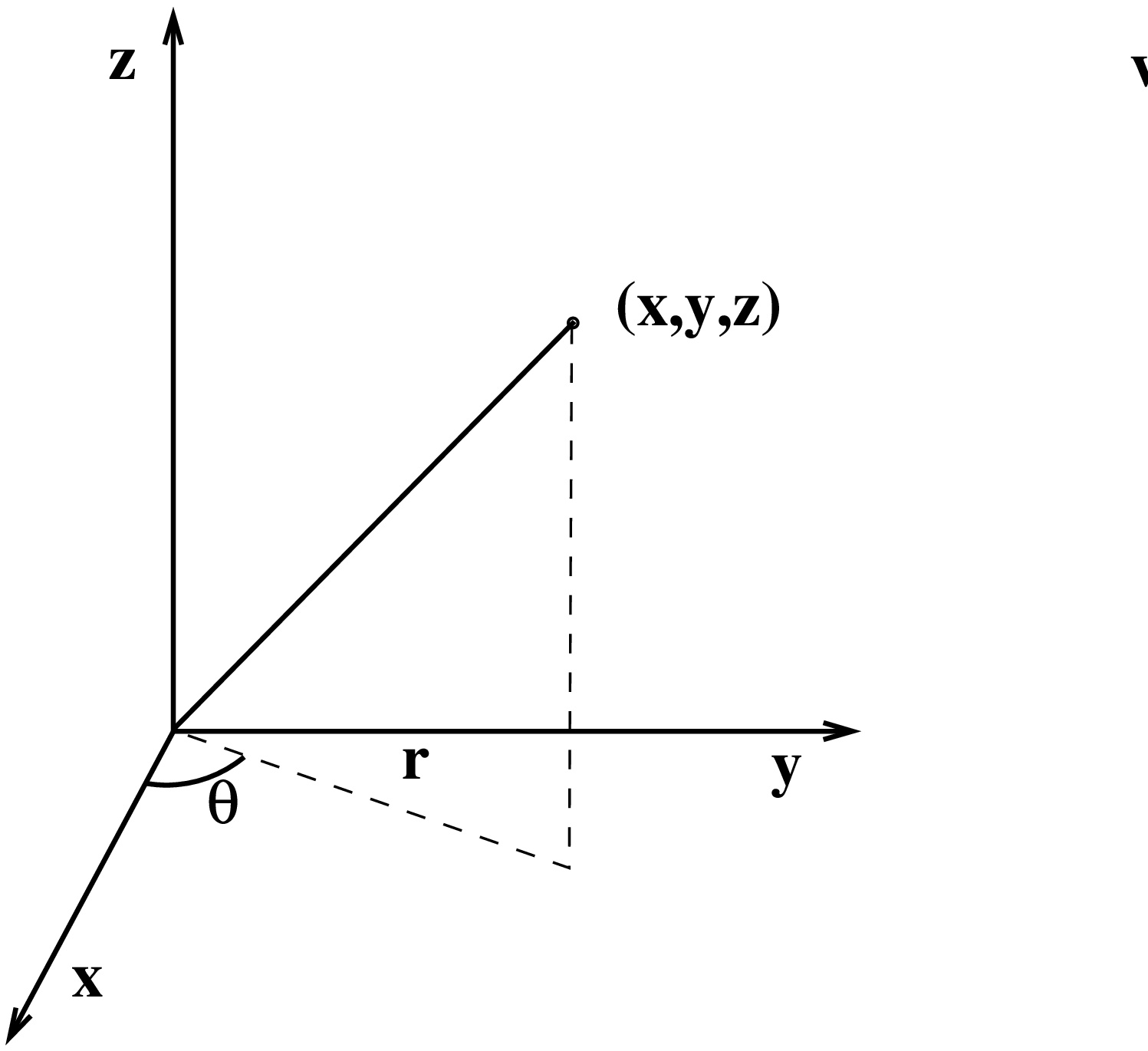
Tällöin muunnoskaavat  \mapsto (x,y,z)") ovat \begin{align*} \begin{cases} x &= r\cos\theta, \\ y &= r\sin\theta, \\ z &= z. \end{cases} \end{align*} Ja muunnoksen Jacobin determinantiksi saadaan
ovat \begin{align*} \begin{cases} x &= r\cos\theta, \\ y &= r\sin\theta, \\ z &= z. \end{cases} \end{align*} Ja muunnoksen Jacobin determinantiksi saadaan }{\partial (r,\theta,z)}\bigg|\,dr\,d\theta\,dz = r\,dr\,d\theta\,dz.")
Sylinterikoordinaateissa on helppo esittää pyörähdyskappaleita -akselin ympäri muodossa ![r = f(z), \quad \text{jossa} \quad z \in [a,b] \text{ ja } \theta \in [0, 2 \pi),](https://mycourses.aalto.fi/filter/tex/pix.php/3ed9515366f90ebd6ca5ee292a63a54d.gif "r = f(z), \quad \text{jossa} \quad z \in [a,b] \text{ ja } \theta \in [0, 2 \pi),") missä on ei-negatiivinen funktio. Sylinterisymmetriset tehtävät!
missä on ei-negatiivinen funktio. Sylinterisymmetriset tehtävät!
Esimerkki
Lasketaan funktion määräämän pyörähdyskappaleen  tilavuus
tilavuus } r\,dr\,d\theta\,dz")
^2 \right ) \, dz = \pi \int_a^b f(z)^2 \, dz,") mikä lienee tuttu kaava.
mikä lienee tuttu kaava.
Pallokoordinaatit
Koordinaatit ") , missä , ,
, missä , ,  .
.
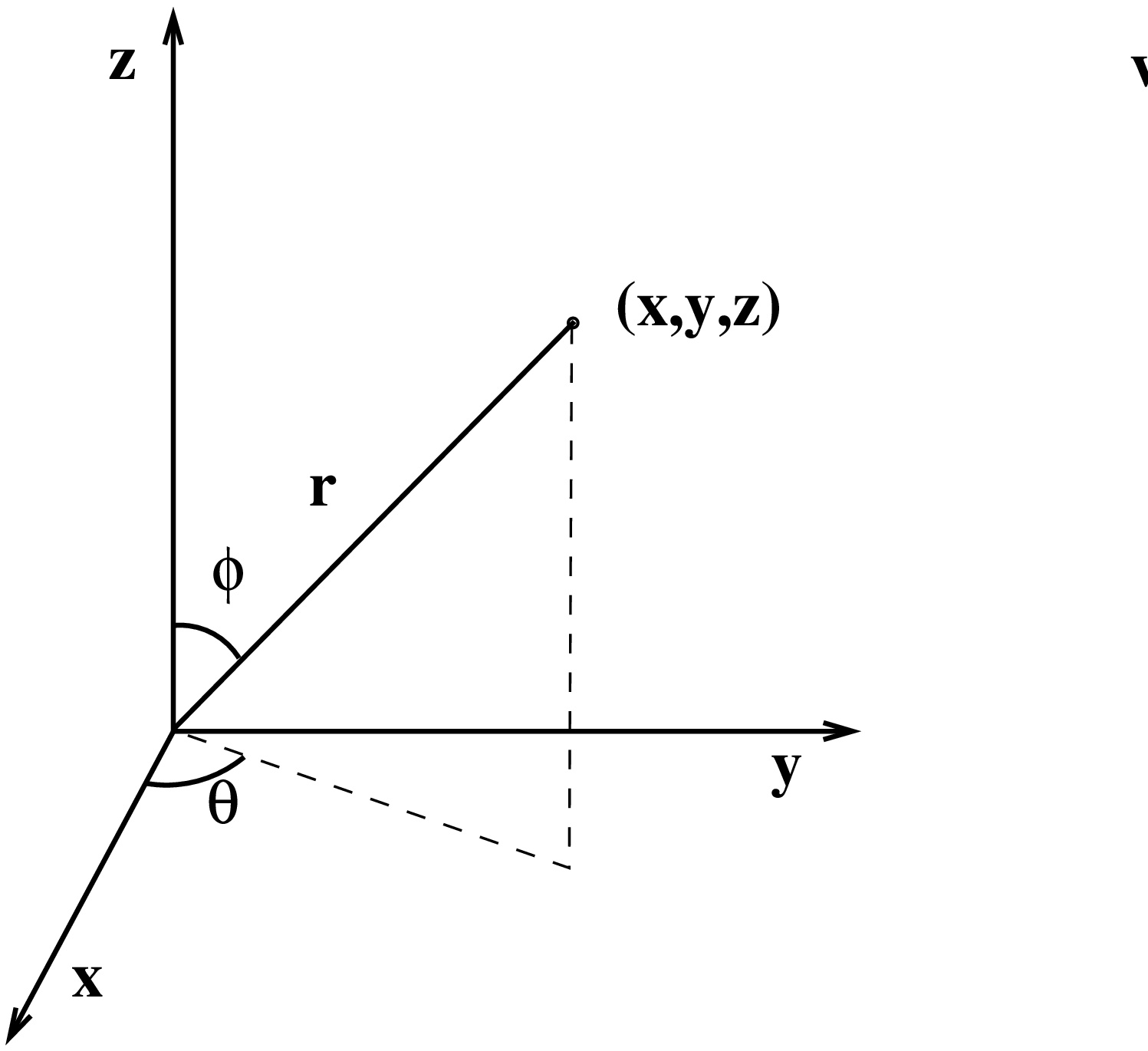
Korotus- eli napakulmaa  käytetään usein
käytetään usein  :n sijasta. Atsimuuttikulma ja korotuskulma ovat yksikäsitteisiä, jos pisteen etäisyys -akselista
:n sijasta. Atsimuuttikulma ja korotuskulma ovat yksikäsitteisiä, jos pisteen etäisyys -akselista  . Muunnoskaavat ovat \begin{align*} \begin{cases} x&=r\sin\phi \cos\theta,\\ y&=r\sin\phi \sin\theta,\\ z&=r\cos\phi, \end{cases} \end{align*} ja muunnoksen Jacobin determinantiksi saadaan
. Muunnoskaavat ovat \begin{align*} \begin{cases} x&=r\sin\phi \cos\theta,\\ y&=r\sin\phi \sin\theta,\\ z&=r\cos\phi, \end{cases} \end{align*} ja muunnoksen Jacobin determinantiksi saadaan }{\partial (r,\theta,\phi)}\bigg|\,dr\,d\theta\,d\phi = r^2\sin\phi \,dr\,d\theta\,d\phi.")
Esimerkki
Lasketaan -säteisen pallon ") tilavuus:
tilavuus:  = \iiint_{\mathbb{B}^3(R)} 1\,dx\,dy\,dz = \int_0^R\int_0^{2\pi}\int_0^\pi r^2\sin\phi\,d\phi\,d\theta\,dr")


7.7. Epäoleelliset integraalit. Muuttujanvaihto taso- ja avaruusintegraaleissa
Epäoleelliset integraalit
Tähän asti integrointi on tapahtunut rajoitetussa alueessa rajoitetulle funktiolle (integrandille). Joskus voidaan kuitenkin integroida rajoittamattomia funktioita ja/tai rajoittamattomassa alueessa.
Tarkastellaan ainoastaan tapausta, jossa funktio on ei-negatiivinen eli  \ge 0") kaikilla
kaikilla  . Lasketaan funktion
. Lasketaan funktion  = e^{-x^2}") integraali alueessa suorien
integraali alueessa suorien  rajoittamassa rajoittamattomassa alueessa , jossa
rajoittamassa rajoittamattomassa alueessa , jossa  . Mikäli integraali on suppenee, sen arvo saadaan laskemalla
. Mikäli integraali on suppenee, sen arvo saadaan laskemalla 
 Integraalin laskemiseksi huomataan, että
Integraalin laskemiseksi huomataan, että  . Siten
. Siten 
Esimerkki
Olkoon \in \mathbb{R}^2 : 0 < x < 1, \, |y| \leq x^2 \rbrace") ja rajoittamaton funktio
ja rajoittamaton funktio =1/x^2") .
.
(i) Lasketaan integraali 

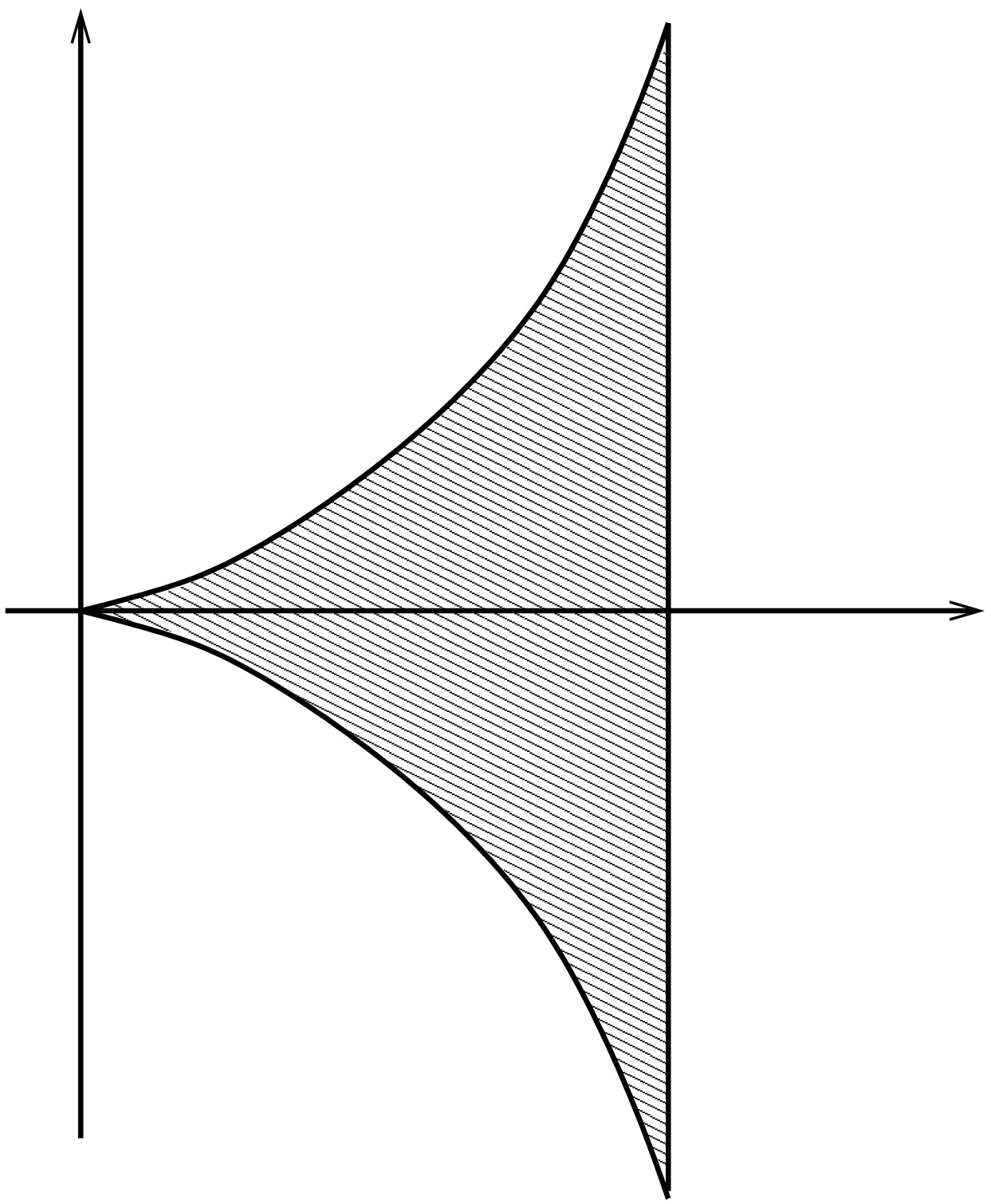

(ii) Lasketaan saman funktion integraali alueessa \in\mathbb{R}^2 : 0 < x < 1,\, |y|\leq \sqrt{x}\rbrace.")

 Suppeneminen riippuu integroitavan funktion lisäksi myös alueesta!
Suppeneminen riippuu integroitavan funktion lisäksi myös alueesta!

7.8. Pintaintegraali
Kaksiulotteinen pinta-ala avaruudessa
Tutkitaan kaksiulotteista kaareutuvaa pintaa  , joka on (piirtämisen helpottamiseksi) -tason yläpuolella avaruudessa .
, joka on (piirtämisen helpottamiseksi) -tason yläpuolella avaruudessa .
Tarkastellaan aluksi -tason neliön yläpuolelle jäävän osan pinta-alaa. Se on ilmeisesti suurempi tai yhtäsuuri kuin vastaavan neliön pinta-ala.
Tästä johtuen pinta-aladifferentiaali  on suurempi tai yhtäsuuri kuin kuin . Itseasiassa saadaan, jos projisoidaan -tasoon. Projektio voidaan kirjoittaa kaavana
on suurempi tai yhtäsuuri kuin kuin . Itseasiassa saadaan, jos projisoidaan -tasoon. Projektio voidaan kirjoittaa kaavana  missä
missä  on pinnan normaalivektorin ja -akselin suuntaisen yksikkövektorin välinen kulma. Toisaalta pistetulon määritelmästä saadaan
on pinnan normaalivektorin ja -akselin suuntaisen yksikkövektorin välinen kulma. Toisaalta pistetulon määritelmästä saadaan  ja siis
ja siis 
Aikaisemmin on johdettu pinnan (ylöspäin suunnatulle) normaalivektorille esitys  Saadaan
Saadaan ^2 + \Big(\frac{\partial z}{\partial y}\Big)^2}") Lisäksi
Lisäksi  ja
ja  , joten
, joten ^2 + \Big(\frac{\partial z}{\partial y}\Big)^2}\,dx\,dy.") Kaltevuuden huomioiva korjaustekijä yleistää tasointegraalin pintaintegraaliksi.
Kaltevuuden huomioiva korjaustekijä yleistää tasointegraalin pintaintegraaliksi.
Esimerkki
Tarkastellaan sylinterin  ,
,  leikkaamaa palasta hyperbolisesta paraboloidista
leikkaamaa palasta hyperbolisesta paraboloidista  . Mikä on palasen pinta-ala?
. Mikä on palasen pinta-ala?
Lasketaan  Siten pinta-aladifferentiaaliksi saadaan
Siten pinta-aladifferentiaaliksi saadaan ^2 + \Big(\frac{\partial z}{\partial y}\Big)^2}\,dx\,dy")
} \,dx\,dy")
 napakoordinaateissa ilmaistuna.
napakoordinaateissa ilmaistuna.
Lasketaan nyt integraali napakoordinaateissa: = \int_0^{2\pi} \int_0^a r\sqrt{1+4r^2}\,dr\,d\theta")

![= \frac{\pi}{4} \bigg|_{r=0}^a\frac{2}{3}(1+4r^2)^{3/2} =\frac{\pi}{6} \big[(1+4a^2)^{3/2} -1\big].](https://mycourses.aalto.fi/filter/tex/pix.php/71e226128ed6cf6aadc1612006256a4c.gif "= \frac{\pi}{4} \bigg|_{r=0}^a\frac{2}{3}(1+4r^2)^{3/2} =\frac{\pi}{6} \big[(1+4a^2)^{3/2} -1\big].")