
MS-E2129 - Systeemien identifiointi D, Luento-opetus, 8.9.2022-13.12.2022
This course space end date is set to 13.12.2022 Search Courses: MS-E2129
Topic outline
-
Online-luennot torstaisin Zoom:ssa klo 12:15-14:00. Ensimmäinen luento on to 8.9.2022 Luentojen Zoom-linkki
https://aalto.zoom.us/j/65891892492
Luennot nauhoitetaan ja kunkin luennon nauhoite saatavilla MC-sivuilta luennon jälkeen.
Luennoilla tarkastellaan mallintamisen filosofiaa, differentiaali- ja differenssiyhtälömalleja, lineaaristen dynaamisten järjestelmien teoriaa, takaisinkytkettyä säätöä, fysikaalista mallintamista, erilaisia identifiointimenetelmiä, mallirakenteen valintaa sekä mallin validointia. Laskuharjoituksissa tutustutaan mm. erilaisiin simuloinnin ja identifioinnin ohjelmistojen käyttöön.Luentojen aihepiirejä ovat:
- Matemaattinen mallintaminen
- Mallintamisen ja mallin määritelmät
- Fysikaalinen mallintaminen ja identifiointi
- Matemaattisen mallien jaottelu
- Systeemimallit
- Input-output-kuvauksen ja tilayhtälömallin ero
- Linearisointi, diskretointi
- Siirtofunktio ja stabiilisuusominaisuudet
- Matemaattisesta mallintamisesta
- Dynaamisen systeemin matemaattisen mallin konstruointiperiaatteita
- Lineaaristen järjestelmien teoriaa
- Ohjattavuus, tarkkailtavuus, systeemiteoreettiset stabiilisuuskäsitteet
- Tilatarkkailu, tilatarkkailija, tilaestimointi
- Kalman-suodin
- Säätötekniikkaa
- Takaisinkytketyn säädön periaate
- PID-säädin
- Tilatakaisinkytkentä
- Identifiointi I
- Transienttianalyysi - impulssivaste, askelvaste
- Korrelaatioanalyysi ja sen suorittaminen
- Identifiointi II
- Taajuusvaste
- Spektrin estimointi periodogrammin avulla
- Fourier-analyysi, spektraalianalyysi
- Identifiointi III (Rakenteelliset/parametriset malli, estimointi)
- Black box -malliluokat
- Parametrien estimointi ennustevirhemenetelmillä
- Vaatimukset herätteelle, rakenteellinen identifioituvuus
- Identifiointi kokonaisuutena I
- Mallinrakennuksen vaiheet
- Identifiointikokeen suunnittelu
- Mallirakenteen valintatekniikat
- Identifiointi kokonaisuutena II
- Mallin validointikysymykset
- Parametriestimaatin ominaisuudet
- Sisäänmeno-ulostulo -käyttäytyminen
- Ennustaminen, residuaalianalyysi
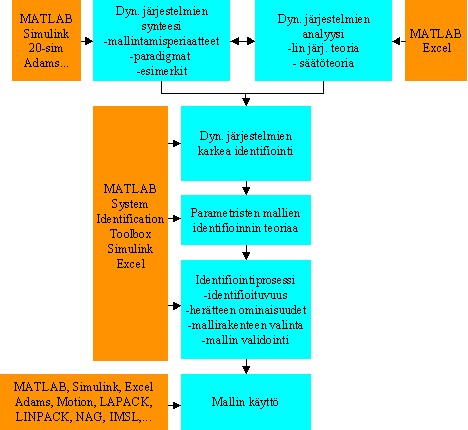
Allaolevassa kuvassa on hahmoteltu aihepiirien etenemistä ja keskinäisiä suhteita sekä kunkin aihealueen kannalta relevantteja tietokoneohjelmia.
-
Kalvot 1: Mallin, systeemin ja dynaamisen systeemin käsitteet. Fysikaalisen mallintamisen ja identifioinnin suhde. Matemaattisten mallien jaottelu ja konstruoinnin vaiheet. Kalvot 2: Systeemimallin muuttujat, tilan käsite.
Kirja: s. 13-32. -
Kalvot 2: Jatkuva-aikaisen dynaamisen systeemin input-output -kuvaus ja tilaesitys. Siirtofunktion muodostaminen Laplace-muuntamalla, taajustaso. Tasapainopiste ja sen stabiilisuus. Lineaarisen järjestelmän stabiilisuus aikatasossa ja taajustasossa. Epälineaarisen järjestelmän linearisointi.
Kirja: s. 33-53, 341-342, 347-349. -
Kalvot 2: Diskreettiaikaisen dynaamisen systeemin input-output -kuvaus ja tilaesitys. Siirtofunktion muodostaminen z-muuntamalla, taajustaso. Diskreettiaikaisen järjestelmän stabiilisuus aikatasossa ja taajustasossa. Kalvot 3.1: Jatkuva-aikaisen tilaesityksen diskretointi.
Kirja: s. 71-74, 343-345, 349.
-
Kalvot 4A: Dynaamisen systeemin fysikaalinen mallinnusprosessi - ongelman strukturointi, perusyhtälöiden muotoilu (tase- ja konstitutiiviset yhtälöt) ja tilaesityksen muodostaminen. Tilaesityksen yksinkertaistaminen. Idea fysikaalisten analogioiden hyödyntämismahdollisuuksista fysikaalisessa mallintamisessa. Kalvot 4B: Matemaattisen mallin konsturointi ja hyödyntäminen päätöksenteon tuessa.
Kirja: s. 83-105, 107-121. -
Kalvot 5: Systeemin ohjattavuus, saavutettaavuus, tarkkailtavuus ja havaittavuus. Saavutettavuuden ja tarkkailtavuuden testaaminen. Saavutettavuuden ja tarkkailtavuuden tulkinta diskreettiaikaiselle systeemille. Sisäänmeno-ulostulo-stabiilisuus ja sen suhde asymptoottiseen stabiilisuuteen. Tilaestimointi ja tilaestimaattori. Kalman-suodin käsitetasolla.Kirja: -.
Tiedoksi, että luennon #5 videota ei valitettavasti ilmesty, koska luennon jälkeen videon konvertointivaiheessa Zoom jakoi nollalla ja nauhoite hävisi bittiavaruuteen. Laskarin #5 kannalta relevantit diastolta #5 löytyvät ja opiskeltavat teemat ovat dynaamisen systeemin saavutettavuus ja sen testaaminen ohjattavuusmatriisin avulla sekä tarkkailtavuus ja sen testaaminen tarkkailtavuusmatriisin avulla. Tilatarkkailu ja -estimointiteema kerrataan luennon 6 aluksi, ja Kalman suodin siirtyi luennolle #6, koska sitä ei ehditty käsittelemään luennolla #5.
-
Luento 5
-
-
Kalvot 6 kokonaisuudessaan: Takaisinkytketty/suljetun silmukan systeemi ja sen siirtofunktio. PID-säädin ja sen osien toiminnallinen merkitys. PID-säätimen taajustasoesitys ja sen yhdistäminen suljetun silmukan siirtofunktioon - säätimen parametrien vaikutus siirtofunktion napoihin, i.e., takaisinkytketyn järjestelmän stabiilisuuteen. Juuriura ja sen hyödyntäminen PID-säätimen parametrien valinnassa. Diskreettiaikainen PID-säädin - pitopiiri ja näytteenotto. Näytteenoton vaikutus säätimen toimintaan. Nyquist-taajuus ja näytteenottovälin valinta. Tilatakaisinkytkentä - vahvistuskertoimen K valinta tarkastelemmalla suljetun silmukan systeemimatriisin ominaisarvoja ja toisaalta ymmärrys siitä, miten K ratkaistaan lineaaris-neliöllisen optimisäätötehtävän avulla. Tilatakaisinkytkentä, kun referenssisignaali on nollasta poikkeava.Kirja: -.Tiedoksi, että luennon #6 videon alussa kerrataan noin 15 minuuttia luennon #5 pääoppeja.
-
-
-
Kalvot 7 kokonaisuudessaan: Lineaaristen mallien superpositioperiaate. Diskreettiaikaisen lineaarisen systeemin input-output -kuvaus ilmaistuna impulssivasteen avulla. Impulssivasteen yhteys pulssinsiirtofunktioon. Askelvasteen yhteys impulssivasteeseen. Jatkuva-aikaisen lineaarisen systeemin input-output -kuvaus ilmaistuna impulssivasteen avulla ja impulssivasteen yhteys siirtofunktioon. Impulssivasteen identifiointi input-output -kuvauksen avulla. Stationaarisen stokastisen prosessin ominaisuudet. Impulssivasteen identifiointi korrelaatioanalyysin avulla.
Kirja: s. 189-199.-
-
-
Kalvot 8 kokonaisuudessaan: Taajuusvaste ja sen yhteys siirtofunktioon. Boden diagrammi. Taajuusanalyysi - toteutus ja ominaispiirteet. Fourier-analyysi - empiirinen siirtofunktioestimaatti, sen määrääminen sisäänmenon ja ulostulon Fourier-muunnosten avulla ja tarkkuus. Deterministisen jatkuva-aikaisen ja diskreettiaikaisen signaalin spektri sekä determinististen signaalien ristispektri. Stationaarisen stokastisen prosessin spektri. Stationaaristen stokastisten prosessien ristispektri. Kohinaisen systeemin taajuusvasteen määrääminen spektraalianalyysin avulla. Periodogrammi ja sen tasoittaminen keskiarvottamalla ja ikkunoimalla.
Kirja: s. 199-222, 68-69, 351-356 (vain spektrien määritelmät).-
-
-
Kalvot 9: Rakenteellisen ja black-box -mallin ero. Rakenteellisen mallin parametrien estimointi. Box-Jenkins, output-error, ARMAX ja ARX -mallit - mallien rakenteet, parametrit, erityispiirteet ja keskinäiset erot. Mallien antamat ennusteet. Parametrien estimointi ennustevirhemenetelmällä. ARX-mallin parametrien estimointi PNS-menetelmällä - ymmärrys käsitteistä parametrin (i.e., estimaattorin) harhaisuus, tarkentuvuus ja tehokkuus sekä ymmärrys siitä, miksei PNS-menetelmää voida käyttää muiden malliluokkien yhteydessä. Ennustevirhemenetelmän konvergenssi taajuustasossa - herätteen spektrin vaikutus taajuusvasteen estimaatin tarkkuuteen. Ennustevirhemenetelmällä estimoitujen parametrien varianssi ja luottamusväli sekä taajuusvasteen estimaatin varianssi. Systeemin ja mallin rakenteellinen ja deterministinen identifioituvuus.
Kirja: s. 227-254.-
-
-
Kalvot 10: Identifiointikokeen suunnittelu - näytteenottovälin ja sisäänmenon valinta, PRBS. Signaalin jatkuvati herättävyys ja sen yhteys diskreettiaikaisen systeemin siirtofunktion parametrien estimoinnin onnistumiseen. Jatkuvasti herrättävyyden määritelmä taajus- ja aikatasossa. Suljetun silmukan systeemin identifiointiin liittyvät ongelmat. Datan esikäsittely - keskiarvotus, trendien poistaminen, esisuodatus, estimointi- vs. validointidata, outlierit. Mallirakenteen valinnan periaatteet. Mallirakenteiden vertaaminen F-testillä ja informaatiokriteerien avulla. Mallin kertaluvun arviointi datasta Hankel-matriisin ja tulomomenttimatriisin avulla.
Kirja: s. 259-264, 265-274, 275-282.
-
-
-
Kalvot 11: Mallin validointiin liittyvät periaatteet - parametriestimaattien ominaisuudet, sisäänmeno-ulostulokäyttäytyminen, simulointi ja ennustaminen. Residuaalien valkoisuus ja sen testaaminen. Yleisimmät mallien validointitekniikat. Yleisiä ajatuksia ja näkökulmia matemaattisesta mallintamisesta sekä mallinnuksen perusperiaatteita. Kurssin yhteenveto ja tenttivaatimukset.Kirja: s. 283-290, 333-338.
-
-
- Matemaattinen mallintaminen